Challenges and opportunities for humanmachine collaboration at beyond human scales
|
|
|
- Flora Greene
- 5 years ago
- Views:
Transcription
1 Challenges and opportunities for humanmachine collaboration at beyond human scales Alex Morison Dave Woods Intelligent Human-Machine Collaboration
2 ~ Synonyms or placeholders for intelligent human-machine collaboration pursuing shared goals negotiation teaming assisting task-specific collaboration open collaboration multi-agent coordination (optimal distribution of tasks) explicit tasks or goals, no guessing optimized coordination well defined or not well-defined world where does initiative reside shared perception? Some workshop notes
3 ~ Other thoughts from workshop What is collaboration?...problem-holders and stake-holders......shared resp., auth., and goals......must negotiate and balance difficult trade-offs What capability is required for collaboration? communication, coordination, initiative, perceiving an environment, sensitivity to attention reciprocity? negotiability? Characteristics of collaboration asymmetric information, goals, both humans and machines are problem-holders Where does initiative reside? in the machine? in the human? What is the world? is it open (the world we live in) or closed (toy worlds) ~ Key opportunity (we didn t focus on much) Sensing systems (machines) are expanding human perceptual and attentional range Motivation
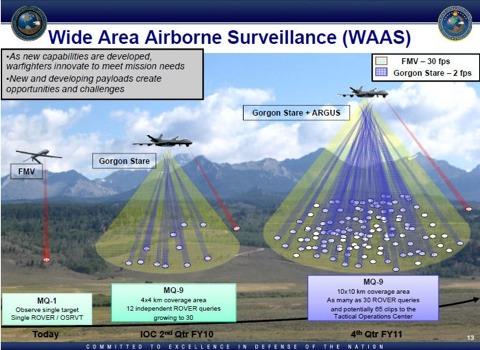



4 Challenge: Expanding spatial and temporal scales




5 Challenging: Expanding stakeholders



6 Challenge: Expanding modalities
7 ~ Challenges for beyond human scale sensor systems: exploring over wider spatial & temporal scales, collaboration, coordination, distance, modalities, algorithms, stakeholders, data (overload), others? ~ How do these new beyond human scales change the roles of (or challenge) human problem holders and stakeholders? ~ Two fundamental human processes are overlooked in coordinating human-sensor systems: Human perception Human attention ~ These human processes do not come for free According to Rodney Brook, HRI we would be fools not to take advantage of these abilities... Transitioning from human to beyond human scale



8 Human perception
9 Human perception
10 Human perception
11 Human perception



12 Human attention
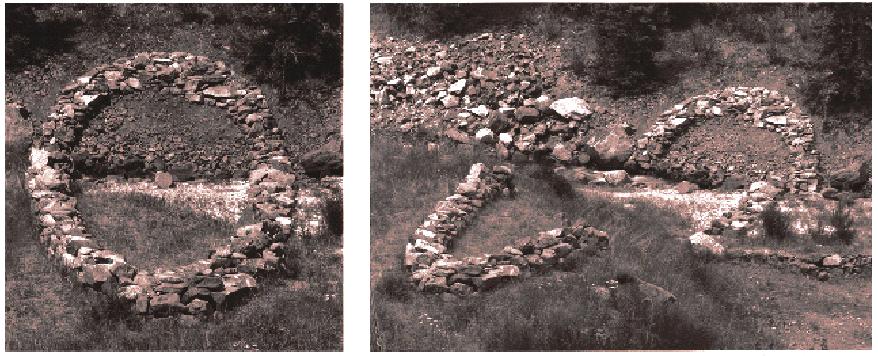
13 Perceptual shortfall example 1


14 Perceptual shortfall example 1
15 Perceptual shortfall example 2

16 Perceptual shortfall example 2
17 Perceptual success, why?


18 Perceptual success, why?
19 Evaluating the perceptual shortfall
20 Evaluating the perceptual shortfall
21 Evaluating the perceptual shortfall



22 Sensor network example: sampling shortfall
23 ~ Our sensor network Sensors with only a partial view of total visual field Hemispheric viewable field Representation based on viewable field and center-surround rel. ~ Analogous to human attention Operates at a point-of-observation Uses a center-surround relationship Balances trade-off between focusing and reorienting ~ Key aspects Attention is a sampling process well-paced to environment Overcomes the potential for data overload at any single point-ofobservation The human eye is not an optical solution, it is a sampling solution, i.e., the eye is not a wide FOV sensor The sampling problem









24 ~ Computational models of attention exist The number is growing Feature extraction Probabilistic selection Input image Inhibition of return Saliency map Attended location Winner-take-all Multiscale low-level feature extraction Other Motion, junctions and terminators, stereo disparity, shape from shading, etc. Centre surround differences and spatial competition Feature maps Orientations 0, 45, 90, 135, etc. Intensity On, off, etc. Colours Red, green, blue, yellow, etc. Feature combinations Top-down attentional bias and training ~ Limits to extending these models to beyond human scales. Fixed image extent Single process Sample orientation changes what is sampled ~ Artificial Attention (A W ) model Two separate but interdependent active processes (center and surround) A dynamic panorama (neither fixed nor static, extent emerges from interaction of the center and surround) Computational models of attention


25 The test environment

26 forward looking backward looking A projection representation



27 Sampling process output
28 Sampling process output
29 ~ Needed breakthroughs for collaboration Machines that move viewpoint to maximize the performance of the human-machine perceptual system Computational Models of Attention (Agents) that can operate over data sets that are beyond human scale ~ Summary We need better understanding of how to support perception and attention systems through sensors at human scales. We need better understanding of how to support perception and attention systems at beyond-human scales. Provided two examples of how we might use sensor systems to expand human fluency to knew scales Summary
30 ~ Thank you The end
31 ~ Potentially, for any single or set of tasks, brute force algorithms can be developed. ~ Brute force will likely... Decrease observability and directability Increase brittleness (decrease resilience) Exacerbate the data overload problem, distractions, losing the ability to stay in control; to effectively manage. ~ Designing for extending human reach beyond human scales Observability and directability follow naturally Resilience emerges from human problem- and stake-holders Why not brute force?
32 ~ Notes from Dave convo ~ compact response to control/automate ~ 1) you can automate but brittle (brute force) ~ 2) humans are problem holders ~ 3) smooth transfer of control ~ 4) directabiliy, observability come almost naturally ~ 6) they don t with algorithm design ~ 7) automate will only exacerbate the data overload problem, distractions, losing the ability to stay in control; to effectively manage. ~ 8) something you can t understand ~ friendly stuff ~ 9) this is how you get to resilience Slide description
Object Substitution Masking: When does Mask Preview work?
 Object Substitution Masking: When does Mask Preview work? Stephen W. H. Lim (psylwhs@nus.edu.sg) Department of Psychology, National University of Singapore, Block AS6, 11 Law Link, Singapore 117570 Chua
Object Substitution Masking: When does Mask Preview work? Stephen W. H. Lim (psylwhs@nus.edu.sg) Department of Psychology, National University of Singapore, Block AS6, 11 Law Link, Singapore 117570 Chua
On the implementation of Visual Attention Architectures
 On the implementation of Visual Attention Architectures KONSTANTINOS RAPANTZIKOS AND NICOLAS TSAPATSOULIS DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING NATIONAL TECHNICAL UNIVERSITY OF ATHENS 9, IROON
On the implementation of Visual Attention Architectures KONSTANTINOS RAPANTZIKOS AND NICOLAS TSAPATSOULIS DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING NATIONAL TECHNICAL UNIVERSITY OF ATHENS 9, IROON
Computational Cognitive Science
 Computational Cognitive Science Lecture 15: Visual Attention Chris Lucas (Slides adapted from Frank Keller s) School of Informatics University of Edinburgh clucas2@inf.ed.ac.uk 14 November 2017 1 / 28
Computational Cognitive Science Lecture 15: Visual Attention Chris Lucas (Slides adapted from Frank Keller s) School of Informatics University of Edinburgh clucas2@inf.ed.ac.uk 14 November 2017 1 / 28
IAT 355 Visual Analytics. Encoding Information: Design. Lyn Bartram
 IAT 355 Visual Analytics Encoding Information: Design Lyn Bartram 4 stages of visualization design 2 Recall: Data Abstraction Tables Data item (row) with attributes (columns) : row=key, cells = values
IAT 355 Visual Analytics Encoding Information: Design Lyn Bartram 4 stages of visualization design 2 Recall: Data Abstraction Tables Data item (row) with attributes (columns) : row=key, cells = values
Computational Cognitive Science. The Visual Processing Pipeline. The Visual Processing Pipeline. Lecture 15: Visual Attention.
 Lecture 15: Visual Attention School of Informatics University of Edinburgh keller@inf.ed.ac.uk November 11, 2016 1 2 3 Reading: Itti et al. (1998). 1 2 When we view an image, we actually see this: The
Lecture 15: Visual Attention School of Informatics University of Edinburgh keller@inf.ed.ac.uk November 11, 2016 1 2 3 Reading: Itti et al. (1998). 1 2 When we view an image, we actually see this: The
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence
 Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Sensory Cue Integration
 Sensory Cue Integration Summary by Byoung-Hee Kim Computer Science and Engineering (CSE) http://bi.snu.ac.kr/ Presentation Guideline Quiz on the gist of the chapter (5 min) Presenters: prepare one main
Sensory Cue Integration Summary by Byoung-Hee Kim Computer Science and Engineering (CSE) http://bi.snu.ac.kr/ Presentation Guideline Quiz on the gist of the chapter (5 min) Presenters: prepare one main
Clusters, Symbols and Cortical Topography
 Clusters, Symbols and Cortical Topography Lee Newman Thad Polk Dept. of Psychology Dept. Electrical Engineering & Computer Science University of Michigan 26th Soar Workshop May 26, 2006 Ann Arbor, MI agenda
Clusters, Symbols and Cortical Topography Lee Newman Thad Polk Dept. of Psychology Dept. Electrical Engineering & Computer Science University of Michigan 26th Soar Workshop May 26, 2006 Ann Arbor, MI agenda
Parallel processing strategies of the primate visual system
 Parallel processing strategies of the primate visual system Parallel pathways from the retina to the cortex Visual input is initially encoded in the retina as a 2D distribution of intensity. The retinal
Parallel processing strategies of the primate visual system Parallel pathways from the retina to the cortex Visual input is initially encoded in the retina as a 2D distribution of intensity. The retinal
Learning to Use Episodic Memory
 Learning to Use Episodic Memory Nicholas A. Gorski (ngorski@umich.edu) John E. Laird (laird@umich.edu) Computer Science & Engineering, University of Michigan 2260 Hayward St., Ann Arbor, MI 48109 USA Abstract
Learning to Use Episodic Memory Nicholas A. Gorski (ngorski@umich.edu) John E. Laird (laird@umich.edu) Computer Science & Engineering, University of Michigan 2260 Hayward St., Ann Arbor, MI 48109 USA Abstract
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
ERA: Architectures for Inference
 ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
Prof. Greg Francis 7/31/15
 s PSY 200 Greg Francis Lecture 06 How do you recognize your grandmother? Action potential With enough excitatory input, a cell produces an action potential that sends a signal down its axon to other cells
s PSY 200 Greg Francis Lecture 06 How do you recognize your grandmother? Action potential With enough excitatory input, a cell produces an action potential that sends a signal down its axon to other cells
Local Image Structures and Optic Flow Estimation
 Local Image Structures and Optic Flow Estimation Sinan KALKAN 1, Dirk Calow 2, Florentin Wörgötter 1, Markus Lappe 2 and Norbert Krüger 3 1 Computational Neuroscience, Uni. of Stirling, Scotland; {sinan,worgott}@cn.stir.ac.uk
Local Image Structures and Optic Flow Estimation Sinan KALKAN 1, Dirk Calow 2, Florentin Wörgötter 1, Markus Lappe 2 and Norbert Krüger 3 1 Computational Neuroscience, Uni. of Stirling, Scotland; {sinan,worgott}@cn.stir.ac.uk
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
Principals of Object Perception
 Principals of Object Perception Elizabeth S. Spelke COGNITIVE SCIENCE 14, 29-56 (1990) Cornell University Summary Infants perceive object by analyzing tree-dimensional surface arrangements and motions.
Principals of Object Perception Elizabeth S. Spelke COGNITIVE SCIENCE 14, 29-56 (1990) Cornell University Summary Infants perceive object by analyzing tree-dimensional surface arrangements and motions.
Agent-Based Systems. Agent-Based Systems. Michael Rovatsos. Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19
 Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Pavlovian, Skinner and other behaviourists contribution to AI
 Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Asymmetries in ecological and sensorimotor laws: towards a theory of subjective experience. James J. Clark
 Asymmetries in ecological and sensorimotor laws: towards a theory of subjective experience James J. Clark Centre for Intelligent Machines McGill University This talk will motivate an ecological approach
Asymmetries in ecological and sensorimotor laws: towards a theory of subjective experience James J. Clark Centre for Intelligent Machines McGill University This talk will motivate an ecological approach
Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space
 Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space Shrihari Vasudevan Advisor: Prof. Dr. Roland Siegwart Autonomous Systems Lab, ETH Zurich, Switzerland.
Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space Shrihari Vasudevan Advisor: Prof. Dr. Roland Siegwart Autonomous Systems Lab, ETH Zurich, Switzerland.
Robot Behavior Genghis, MIT Callisto, GATech
 Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
IAT 355 Perception 1. Or What You See is Maybe Not What You Were Supposed to Get
 IAT 355 Perception 1 Or What You See is Maybe Not What You Were Supposed to Get Why we need to understand perception The ability of viewers to interpret visual (graphical) encodings of information and
IAT 355 Perception 1 Or What You See is Maybe Not What You Were Supposed to Get Why we need to understand perception The ability of viewers to interpret visual (graphical) encodings of information and
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Symbolic Pointillism: Computer Art motivated by Human Perception
 Accepted for the Symposium Artificial Intelligence and Creativity in Arts and Science Symposium at the AISB 2003 Convention: Cognition in Machines and Animals. Symbolic Pointillism: Computer Art motivated
Accepted for the Symposium Artificial Intelligence and Creativity in Arts and Science Symposium at the AISB 2003 Convention: Cognition in Machines and Animals. Symbolic Pointillism: Computer Art motivated
COMP 3020: Human-Computer Interaction I
 reddit.com 1 2 COMP 3020: Human-Computer Interaction I Fall 2017 Prototype Lifetime James Young, with acknowledgements to Anthony Tang, Andrea Bunt, Pourang Irani, Julie Kientz, Saul Greenberg, Ehud Sharlin,
reddit.com 1 2 COMP 3020: Human-Computer Interaction I Fall 2017 Prototype Lifetime James Young, with acknowledgements to Anthony Tang, Andrea Bunt, Pourang Irani, Julie Kientz, Saul Greenberg, Ehud Sharlin,
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Validating the Visual Saliency Model
 Validating the Visual Saliency Model Ali Alsam and Puneet Sharma Department of Informatics & e-learning (AITeL), Sør-Trøndelag University College (HiST), Trondheim, Norway er.puneetsharma@gmail.com Abstract.
Validating the Visual Saliency Model Ali Alsam and Puneet Sharma Department of Informatics & e-learning (AITeL), Sør-Trøndelag University College (HiST), Trondheim, Norway er.puneetsharma@gmail.com Abstract.
LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES
 Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
International School of Turin
 International School of Turin Adapted from the IB PSE scope and sequence Personal, Social and Physical Education Scope and Sequence Identity An understanding of our own beliefs, values, attitudes, experiences
International School of Turin Adapted from the IB PSE scope and sequence Personal, Social and Physical Education Scope and Sequence Identity An understanding of our own beliefs, values, attitudes, experiences
Computational Cognitive Science
 Computational Cognitive Science Lecture 19: Contextual Guidance of Attention Chris Lucas (Slides adapted from Frank Keller s) School of Informatics University of Edinburgh clucas2@inf.ed.ac.uk 20 November
Computational Cognitive Science Lecture 19: Contextual Guidance of Attention Chris Lucas (Slides adapted from Frank Keller s) School of Informatics University of Edinburgh clucas2@inf.ed.ac.uk 20 November
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
NLP Leadership Summit. The Elder Columns, Part III, Survey Results (First Draft) What is NLP? Answer LS2018
 What is NLP? Answer LS2018") NLP Leadership Summit The Elder Columns, Part III, Survey Results (First Draft) What is NLP? Answer LS2018 Calculation There are 59 voters. They have collectively taught NLP for 1363 years Between them
NLP Leadership Summit The Elder Columns, Part III, Survey Results (First Draft) What is NLP? Answer LS2018 Calculation There are 59 voters. They have collectively taught NLP for 1363 years Between them
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
A Neural Network Architecture for.
 A Neural Network Architecture for Self-Organization of Object Understanding D. Heinke, H.-M. Gross Technical University of Ilmenau, Division of Neuroinformatics 98684 Ilmenau, Germany e-mail: dietmar@informatik.tu-ilmenau.de
A Neural Network Architecture for Self-Organization of Object Understanding D. Heinke, H.-M. Gross Technical University of Ilmenau, Division of Neuroinformatics 98684 Ilmenau, Germany e-mail: dietmar@informatik.tu-ilmenau.de
Development of goal-directed gaze shift based on predictive learning
 4th International Conference on Development and Learning and on Epigenetic Robotics October 13-16, 2014. Palazzo Ducale, Genoa, Italy WePP.1 Development of goal-directed gaze shift based on predictive
4th International Conference on Development and Learning and on Epigenetic Robotics October 13-16, 2014. Palazzo Ducale, Genoa, Italy WePP.1 Development of goal-directed gaze shift based on predictive
M.Sc. in Cognitive Systems. Model Curriculum
 M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
Computational Architectures in Biological Vision, USC, Spring 2001
 Computational Architectures in Biological Vision, USC, Spring 2001 Lecture 11: Visual Illusions. Reading Assignments: None 1 What Can Illusions Teach Us? They exacerbate the failure modes of our visual
Computational Architectures in Biological Vision, USC, Spring 2001 Lecture 11: Visual Illusions. Reading Assignments: None 1 What Can Illusions Teach Us? They exacerbate the failure modes of our visual
Opponent theory PSY 310 Greg Francis. Lecture 18. Trichromatic theory
 PSY 310 Greg Francis Lecture 18 Reach that last 1%. Trichromatic theory Different colors are represented as a pattern across the three basic colors Nicely predicted the existence of the three cone types
PSY 310 Greg Francis Lecture 18 Reach that last 1%. Trichromatic theory Different colors are represented as a pattern across the three basic colors Nicely predicted the existence of the three cone types
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
V1 (Chap 3, part II) Lecture 8. Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017
 Lecture 8. Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017") V1 (Chap 3, part II) Lecture 8 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017 Topography: mapping of objects in space onto the visual cortex contralateral representation
V1 (Chap 3, part II) Lecture 8 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Fall 2017 Topography: mapping of objects in space onto the visual cortex contralateral representation
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Fodor on Functionalism EMILY HULL
 Fodor on Functionalism EMILY HULL Deficiencies in Other Theories Dualism Failure to account for mental causation Immaterial substance cannot cause physical events If mental processes were a different substance
Fodor on Functionalism EMILY HULL Deficiencies in Other Theories Dualism Failure to account for mental causation Immaterial substance cannot cause physical events If mental processes were a different substance
The 29th Fuzzy System Symposium (Osaka, September 9-, 3) Color Feature Maps (BY, RG) Color Saliency Map Input Image (I) Linear Filtering and Gaussian
 Color Feature Maps (BY, RG) Color Saliency Map Input Image (I) Linear Filtering and Gaussian") The 29th Fuzzy System Symposium (Osaka, September 9-, 3) A Fuzzy Inference Method Based on Saliency Map for Prediction Mao Wang, Yoichiro Maeda 2, Yasutake Takahashi Graduate School of Engineering, University
The 29th Fuzzy System Symposium (Osaka, September 9-, 3) A Fuzzy Inference Method Based on Saliency Map for Prediction Mao Wang, Yoichiro Maeda 2, Yasutake Takahashi Graduate School of Engineering, University
A context-dependent attention system for a social robot
 A context-dependent attention system for a social robot Cynthia Breazeal and Brian Scassellati MIT Artificial Intelligence Lab 545 Technology Square Cambridge, MA 02139 U. S. A. Abstract This paper presents
A context-dependent attention system for a social robot Cynthia Breazeal and Brian Scassellati MIT Artificial Intelligence Lab 545 Technology Square Cambridge, MA 02139 U. S. A. Abstract This paper presents
POC Brain Tumor Segmentation. vlife Use Case
 Brain Tumor Segmentation vlife Use Case 1 Automatic Brain Tumor Segmentation using CNN Background Brain tumor segmentation seeks to separate healthy tissue from tumorous regions such as the advancing tumor,
Brain Tumor Segmentation vlife Use Case 1 Automatic Brain Tumor Segmentation using CNN Background Brain tumor segmentation seeks to separate healthy tissue from tumorous regions such as the advancing tumor,
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
How do individuals with congenital blindness form a conscious representation of a world they have never seen? brain. deprived of sight?
 How do individuals with congenital blindness form a conscious representation of a world they have never seen? What happens to visual-devoted brain structure in individuals who are born deprived of sight?
How do individuals with congenital blindness form a conscious representation of a world they have never seen? What happens to visual-devoted brain structure in individuals who are born deprived of sight?
Agents and State Spaces. CSCI 446: Artificial Intelligence
 Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Optimism and Attributional Style
 Optimism and Attributional Style Numerous studies have been conducted on optimism and pessimism. This research has identified two different types of optimism/pessimism; one is a general disposition (e.g.
Optimism and Attributional Style Numerous studies have been conducted on optimism and pessimism. This research has identified two different types of optimism/pessimism; one is a general disposition (e.g.
Neurally Inspired Mechanisms for the Dynamic Visual Attention Map Generation Task
 Neurally Inspired Mechanisms for the Dynamic Visual Attention Map Generation Task Maria T. Lopez 1, Miguel A. Fernandez 1, Antonio Fernandez-Caballero 1, and Ana E. Delgado 2 Departamento de Informatica
Neurally Inspired Mechanisms for the Dynamic Visual Attention Map Generation Task Maria T. Lopez 1, Miguel A. Fernandez 1, Antonio Fernandez-Caballero 1, and Ana E. Delgado 2 Departamento de Informatica
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Compound Effects of Top-down and Bottom-up Influences on Visual Attention During Action Recognition
 Compound Effects of Top-down and Bottom-up Influences on Visual Attention During Action Recognition Bassam Khadhouri and Yiannis Demiris Department of Electrical and Electronic Engineering Imperial College
Compound Effects of Top-down and Bottom-up Influences on Visual Attention During Action Recognition Bassam Khadhouri and Yiannis Demiris Department of Electrical and Electronic Engineering Imperial College
Biologically-Inspired Control in Problem Solving. Thad A. Polk, Patrick Simen, Richard L. Lewis, & Eric Freedman
 Biologically-Inspired Control in Problem Solving Thad A. Polk, Patrick Simen, Richard L. Lewis, & Eric Freedman 1 Computational Models of Control Challenge: Develop computationally explicit theories of
Biologically-Inspired Control in Problem Solving Thad A. Polk, Patrick Simen, Richard L. Lewis, & Eric Freedman 1 Computational Models of Control Challenge: Develop computationally explicit theories of
Computational Models of Visual Attention: Bottom-Up and Top-Down. By: Soheil Borhani
 Computational Models of Visual Attention: Bottom-Up and Top-Down By: Soheil Borhani Neural Mechanisms for Visual Attention 1. Visual information enter the primary visual cortex via lateral geniculate nucleus
Computational Models of Visual Attention: Bottom-Up and Top-Down By: Soheil Borhani Neural Mechanisms for Visual Attention 1. Visual information enter the primary visual cortex via lateral geniculate nucleus
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
PSYC 441 Cognitive Psychology II
 PSYC 441 Cognitive Psychology II Session 4 Background of Object Recognition Lecturer: Dr. Benjamin Amponsah, Dept., of Psychology, UG, Legon Contact Information: bamponsah@ug.edu.gh College of Education
PSYC 441 Cognitive Psychology II Session 4 Background of Object Recognition Lecturer: Dr. Benjamin Amponsah, Dept., of Psychology, UG, Legon Contact Information: bamponsah@ug.edu.gh College of Education
Performance and Saliency Analysis of Data from the Anomaly Detection Task Study
 Performance and Saliency Analysis of Data from the Anomaly Detection Task Study Adrienne Raglin 1 and Andre Harrison 2 1 U.S. Army Research Laboratory, Adelphi, MD. 20783, USA {adrienne.j.raglin.civ, andre.v.harrison2.civ}@mail.mil
Performance and Saliency Analysis of Data from the Anomaly Detection Task Study Adrienne Raglin 1 and Andre Harrison 2 1 U.S. Army Research Laboratory, Adelphi, MD. 20783, USA {adrienne.j.raglin.civ, andre.v.harrison2.civ}@mail.mil
Motion Control for Social Behaviours
 Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Competing Frameworks in Perception
 Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception
 Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
Intelligent Machines That Act Rationally. Hang Li Bytedance AI Lab
 Intelligent Machines That Act Rationally Hang Li Bytedance AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly
Intelligent Machines That Act Rationally Hang Li Bytedance AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly
Edinburgh Festivals Impact Study
 Edinburgh Festivals Impact Study Research and Knowledge Exchange in the Creative Economy: Impact and Effect 30 September 2011 What we were asked to do Commissioned to conduct an impact assessment of the
Edinburgh Festivals Impact Study Research and Knowledge Exchange in the Creative Economy: Impact and Effect 30 September 2011 What we were asked to do Commissioned to conduct an impact assessment of the
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Introduction to Computational Neuroscience
 Introduction to Computational Neuroscience Lecture 11: Attention & Decision making Lesson Title 1 Introduction 2 Structure and Function of the NS 3 Windows to the Brain 4 Data analysis 5 Data analysis
Introduction to Computational Neuroscience Lecture 11: Attention & Decision making Lesson Title 1 Introduction 2 Structure and Function of the NS 3 Windows to the Brain 4 Data analysis 5 Data analysis
Visual Perception. Agenda. Visual perception. CS Information Visualization January 20, 2011 John Stasko. Pre-attentive processing Color Etc.
 Topic Notes Visual Perception CS 7450 - Information Visualization January 20, 2011 John Stasko Agenda Visual perception Pre-attentive processing Color Etc. Spring 2011 CS 7450 2 1 Semiotics The study of
Topic Notes Visual Perception CS 7450 - Information Visualization January 20, 2011 John Stasko Agenda Visual perception Pre-attentive processing Color Etc. Spring 2011 CS 7450 2 1 Semiotics The study of
On the role of context in probabilistic models of visual saliency
 1 On the role of context in probabilistic models of visual saliency Date Neil Bruce, Pierre Kornprobst NeuroMathComp Project Team, INRIA Sophia Antipolis, ENS Paris, UNSA, LJAD 2 Overview What is saliency?
1 On the role of context in probabilistic models of visual saliency Date Neil Bruce, Pierre Kornprobst NeuroMathComp Project Team, INRIA Sophia Antipolis, ENS Paris, UNSA, LJAD 2 Overview What is saliency?
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Affective Game Engines: Motivation & Requirements
 Affective Game Engines: Motivation & Requirements Eva Hudlicka Psychometrix Associates Blacksburg, VA hudlicka@ieee.org psychometrixassociates.com DigiPen Institute of Technology February 20, 2009 1 Outline
Affective Game Engines: Motivation & Requirements Eva Hudlicka Psychometrix Associates Blacksburg, VA hudlicka@ieee.org psychometrixassociates.com DigiPen Institute of Technology February 20, 2009 1 Outline
2012 Course : The Statistician Brain: the Bayesian Revolution in Cognitive Science
 2012 Course : The Statistician Brain: the Bayesian Revolution in Cognitive Science Stanislas Dehaene Chair in Experimental Cognitive Psychology Lecture No. 4 Constraints combination and selection of a
2012 Course : The Statistician Brain: the Bayesian Revolution in Cognitive Science Stanislas Dehaene Chair in Experimental Cognitive Psychology Lecture No. 4 Constraints combination and selection of a
DYNAMICISM & ROBOTICS
 DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
Sensation occurs when external information is picked up by sensory receptors (what your 5 senses do) Perception how your brain interprets the
 Perception how your brain interprets the") Sensory and Perceptual Development Sensation occurs when external information is picked up by sensory receptors (what your 5 senses do) Perception how your brain interprets the information fromyour 5 senses
Sensory and Perceptual Development Sensation occurs when external information is picked up by sensory receptors (what your 5 senses do) Perception how your brain interprets the information fromyour 5 senses
COGS 107B Week 1. Hyun Ji Friday 4:00-4:50pm
 COGS 107B Week 1 Hyun Ji Friday 4:00-4:50pm Before We Begin... Hyun Ji 4th year Cognitive Behavioral Neuroscience Email: hji@ucsd.edu In subject, always add [COGS107B] Office hours: Wednesdays, 3-4pm in
COGS 107B Week 1 Hyun Ji Friday 4:00-4:50pm Before We Begin... Hyun Ji 4th year Cognitive Behavioral Neuroscience Email: hji@ucsd.edu In subject, always add [COGS107B] Office hours: Wednesdays, 3-4pm in
Solutions for Chapter 2 Intelligent Agents
 Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Object vision (Chapter 4)
") Object vision (Chapter 4) Lecture 8 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Spring 2015 1 Outline for today: Chap 3: adaptation Chap 4: intro to object vision gestalt
Object vision (Chapter 4) Lecture 8 Jonathan Pillow Sensation & Perception (PSY 345 / NEU 325) Princeton University, Spring 2015 1 Outline for today: Chap 3: adaptation Chap 4: intro to object vision gestalt
Sparse Coding in Sparse Winner Networks
 Sparse Coding in Sparse Winner Networks Janusz A. Starzyk 1, Yinyin Liu 1, David Vogel 2 1 School of Electrical Engineering & Computer Science Ohio University, Athens, OH 45701 {starzyk, yliu}@bobcat.ent.ohiou.edu
Sparse Coding in Sparse Winner Networks Janusz A. Starzyk 1, Yinyin Liu 1, David Vogel 2 1 School of Electrical Engineering & Computer Science Ohio University, Athens, OH 45701 {starzyk, yliu}@bobcat.ent.ohiou.edu
What is mid level vision? Mid Level Vision. What is mid level vision? Lightness perception as revealed by lightness illusions
 What is mid level vision? Mid Level Vision March 18, 2004 Josh McDermott Perception involves inferring the structure of the world from measurements of energy generated by the world (in vision, this is
What is mid level vision? Mid Level Vision March 18, 2004 Josh McDermott Perception involves inferring the structure of the world from measurements of energy generated by the world (in vision, this is
COGS 101A: Sensation and Perception
 COGS 101A: Sensation and Perception 1 Virginia R. de Sa Department of Cognitive Science UCSD Lecture 5: LGN and V1: Magno and Parvo streams Chapter 3 Course Information 2 Class web page: http://cogsci.ucsd.edu/
COGS 101A: Sensation and Perception 1 Virginia R. de Sa Department of Cognitive Science UCSD Lecture 5: LGN and V1: Magno and Parvo streams Chapter 3 Course Information 2 Class web page: http://cogsci.ucsd.edu/
What is AI? The science of making machines that: Think rationally. Think like people. Act like people. Act rationally
 What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
Selective Attention. Modes of Control. Domains of Selection
 The New Yorker (2/7/5) Selective Attention Perception and awareness are necessarily selective (cell phone while driving): attention gates access to awareness Selective attention is deployed via two modes
The New Yorker (2/7/5) Selective Attention Perception and awareness are necessarily selective (cell phone while driving): attention gates access to awareness Selective attention is deployed via two modes
- Types of Conflict - Sources of Conflict - Five Styles of Intervention - Handling Conflict - Things to Remember
 - Types of Conflict - Sources of Conflict - Five Styles of Intervention - Handling Conflict - Things to Remember 1. Interpersonal 2. Intrapersonal 3. Intragroup 4. Intergroup Constructive: Healthy exchange
- Types of Conflict - Sources of Conflict - Five Styles of Intervention - Handling Conflict - Things to Remember 1. Interpersonal 2. Intrapersonal 3. Intragroup 4. Intergroup Constructive: Healthy exchange
CSC2130: Empirical Research Methods for Software Engineering
 CSC2130: Empirical Research Methods for Software Engineering Steve Easterbrook sme@cs.toronto.edu www.cs.toronto.edu/~sme/csc2130/ 2004-5 Steve Easterbrook. This presentation is available free for non-commercial
CSC2130: Empirical Research Methods for Software Engineering Steve Easterbrook sme@cs.toronto.edu www.cs.toronto.edu/~sme/csc2130/ 2004-5 Steve Easterbrook. This presentation is available free for non-commercial
Neurophysiology and Information: Theory of Brain Function
 Neurophysiology and Information: Theory of Brain Function Christopher Fiorillo BiS 527, Spring 2012 042 350 4326, fiorillo@kaist.ac.kr Part 1: Inference in Perception, Cognition, and Motor Control Reading:
Neurophysiology and Information: Theory of Brain Function Christopher Fiorillo BiS 527, Spring 2012 042 350 4326, fiorillo@kaist.ac.kr Part 1: Inference in Perception, Cognition, and Motor Control Reading:
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Single cell tuning curves vs population response. Encoding: Summary. Overview of the visual cortex. Overview of the visual cortex
 Encoding: Summary Spikes are the important signals in the brain. What is still debated is the code: number of spikes, exact spike timing, temporal relationship between neurons activities? Single cell tuning
Encoding: Summary Spikes are the important signals in the brain. What is still debated is the code: number of spikes, exact spike timing, temporal relationship between neurons activities? Single cell tuning
Intelligent Machines That Act Rationally. Hang Li Toutiao AI Lab
 Intelligent Machines That Act Rationally Hang Li Toutiao AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly Thinking
Intelligent Machines That Act Rationally Hang Li Toutiao AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly Thinking
Overview of the visual cortex. Ventral pathway. Overview of the visual cortex
 Overview of the visual cortex Two streams: Ventral What : V1,V2, V4, IT, form recognition and object representation Dorsal Where : V1,V2, MT, MST, LIP, VIP, 7a: motion, location, control of eyes and arms
Overview of the visual cortex Two streams: Ventral What : V1,V2, V4, IT, form recognition and object representation Dorsal Where : V1,V2, MT, MST, LIP, VIP, 7a: motion, location, control of eyes and arms
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention
 Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of
Analogical Representations. Symbolic Representations. Culture as Cognition. Abstract mental representations. Includes: 9/15/2012
 Analogical Representations Mental images Analogous to object Brain processes mental objects like real objects Symbolic Representations Abstract mental representations Includes: Words Concepts Culture as
Analogical Representations Mental images Analogous to object Brain processes mental objects like real objects Symbolic Representations Abstract mental representations Includes: Words Concepts Culture as
A: implicit, unconscious, tacit. The name for cognitive processes of which we lack awareness
 A: implicit, unconscious, tacit The name for cognitive processes of which we lack awareness A: top-down The usually conscious influence of past experience on behavior A: circular reasoning Given 2 premises,
A: implicit, unconscious, tacit The name for cognitive processes of which we lack awareness A: top-down The usually conscious influence of past experience on behavior A: circular reasoning Given 2 premises,
Fleishman s Taxonomy of Human Abilities
 Fleishman s Taxonomy of Human Abilities Ability Taxonomy: Introduction At I/O Solutions, we utilize research to build selection tools that are effective and valid. Part of this effort is to use an ability
Fleishman s Taxonomy of Human Abilities Ability Taxonomy: Introduction At I/O Solutions, we utilize research to build selection tools that are effective and valid. Part of this effort is to use an ability
2 Psychological Processes : An Introduction
 2 Psychological Processes : An Introduction 2.1 Introduction In our everyday life we try to achieve various goals through different activities, receive information from our environment, learn about many
2 Psychological Processes : An Introduction 2.1 Introduction In our everyday life we try to achieve various goals through different activities, receive information from our environment, learn about many
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Rajeev Raizada: Statement of research interests
 Rajeev Raizada: Statement of research interests Overall goal: explore how the structure of neural representations gives rise to behavioural abilities and disabilities There tends to be a split in the field
Rajeev Raizada: Statement of research interests Overall goal: explore how the structure of neural representations gives rise to behavioural abilities and disabilities There tends to be a split in the field