Control principles in upper-limb prostheses
|
|
|
- Kelley Beasley
- 5 years ago
- Views:
Transcription
 electrocorticography (ECoG) signals electrooculography (EOG ) helps in controlling prosthesis by decoding eye movement external sensory inputs from")
1 Control principles in upper-limb prostheses electromyographic (EMG) signals generated by muscle contractions electroneurographic (ENG) signals interface with the peripheral nervous system (PNS) interface with the central nervous system (CNS) electrocorticography (ECoG) signals electrooculography (EOG ) helps in controlling prosthesis by decoding eye movement external sensory inputs from switches, foot pressure sensors, cameras, inertial measurement units (IMU), etc
 the activation of MU creates a motor unit action potential (MUAP) EMG signal is the summation of these MUAPTs (motor unit action")
2 electromyography detects the electrical potential generated by muscle cells signals from voluntarily contracted muscles EMG signals are the current generated by the ionic flow across membranes of the muscle fibers muscle fibers are in groups called motor units (MU) the activation of MU creates a motor unit action potential (MUAP) EMG signal is the summation of these MUAPTs (motor unit action potential trains) STEPS FOR DEVICE CONTROL signal acquisition decoding control Electromyographic EMG

3 S EMG non-invasive method surface electrodes are used measured potentials on skin surface Electromyographic EMG surface electrodes are able to provide only a limited assessment of the muscle activity I EMG invasive detected using needle electrodes or wires potentials of selected muscles are measured
4 Electromyographic EMG
5 Electromyographic EMG

6 Electromyographic EMG



7 Hybrid myoelectric control systems EMG+voice EMG+IMU EMG+manual switch
8 EMG drawbacks loss of muscles makes EMG unavailable and affect controllability main concern: sensory feedback to prevent object slippage electrocutaneous feedback can cause pain to the wearer pressure feedback Targeted Muscle Reinnervation TMR provides cutaneous sensory feedback to the amputee by relocating residual nerves to nonfunctional muscles
9 EMG vs EEG electromyographic (EMG) has allowed for an increase in the degrees of freedom (DOFs) of hand designs larger number of available grip patterns, little added complexity for the wearer little sensory feedback non-natural control (must be learned by the user) electroneurographic (ENG) signals more invasive than using surface EMG for control more natural control both efferent and afferent sensory feedback


10 Sensory feedback in bidirectional hand prostheses poor sensory feedback available to the user while grasping natural sensory information stimulating the sensory peripheral ulnar nerves real-time control of a dexterous prosthesis blindly identify compliance and shape S. Raspopovic et al
11 Electroneurographic ENG electroneurographic (ENG) signals interface with the peripheral nervous system (PNS) interface with the central nervous system (CNS)

12 Electroneurographic ENG PNS an electrode acting as an interface with the PNS can be extraneural or intraneural most common extraneural cuff electrode, which surrounds the nerve fascicle and acquires signals from its exterior intraneural electrodes are placed directly within the tissue of the nerve



13 Electroneurographic ENG CNS the most invasive method of ENG control is to implant electrodes into the motor cortex of an amputated patient inside the skull controlled by microelectrodes implanted within the brain (CNS: brain and spinal cord) CNS

14 Neuroscience and Robotics results coming form neuroscience research: the behavior of the human hand during grasp is dominated by movements in a continuous configuration space with limited dimensions tendon couplings and muscle activation patterns exhibited by humans lead to significant joint coupling and inter-finger coordination, i.e. lead to significant movements coordination, called postural synergies

15 How we can close the gap? postural synergies hold great potential for robot hand s control Evidence of simplified control schemes at neurological level for the organization of hand movements The first two synergies account for >80% of the hand configurations variance reduction of the grasp synthesis problem dimention control of the robotic hand in a space of highly reduced dimensions with respect to the number of DOFs prosthetic devices provided of simple interface and control strategies based on few EMG input
 the hand design aims to the maximum")

16 Postural synergies for human-like grasping the DEXMART HAND and UB Hand IV are innovative robotic hands with the same mechanical design (different thumb kinematics) the hand design aims to the maximum simplification endoskeletal structures pin joints integrated into the phalanges manufacturing and assembly complexity have been reduced by systematic parts integration adopting fusion deposition manufacturing


17 Hand Modelling the mechanical structure remotely located actuators with tendon-based transmissions routed through fixed paths (sliding tendons), N+1 tendon configuration surface compliance is introduced through a purposely designed soft cover mimicking human skin the kinematics structure the DEXMART Hand presents a total amount of 20 DOFs, the medial and the distal joints are coupled by means of an internal tendon thumb with different kinematics and joint limits w. r. t. the other fingers, humanlike manipulation capabilities and mobility (opposition with the other four fingers) UB Hand IV DEXMART Hand
 human fingertip position are detected using")

18 Human Hand Observation different methods for the observation and different tecnologies (cyber gloves, motion tracking systems ) human fingertip position are detected using low-cost RGBD camera (Kinect) human grasps are mapped directly on the robotic hand kinematics by means of CLIK the kinematics is suitably scaled on the basis of the human hand dimension


19 Mapping the human hand grasps five subjects with different hand size have been involved in the experiments to determine the hand pose with respect to the camera for the i-th subject fingertips and panel reference points are detected in the open hand configuration the affine transformation between the camera and the hand reference frame is obtained the position of the panel reference points with respect to the hand frame is computed


20 Mapping the human hand grasps each subject performs the set of 36 postures represented in the table the mapping from the human hand fingertip positions and the robotic hand joint positions is performed: by scaling the robot hand link dimensions to fit with the human subject by inverting the robot hand kinematics by means of CLIK
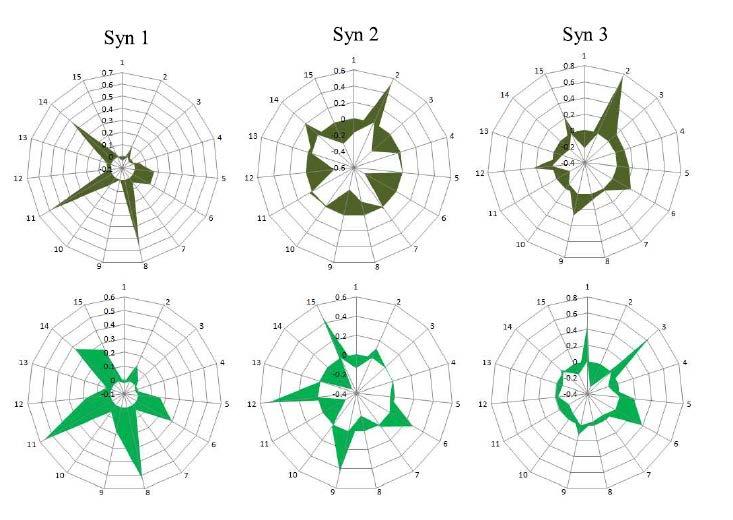

21 The three predominant synergies UB Hand IV DEXMART Hand

22 Synergies Computation on the Grasping Dataset configuration matrix of the reproduced grasps PCA on the grasps offset matrix base of the selected synergies (> 85%) zero offset each hand grasp can be approximated by a suitable selection of the synergy coefficients the projection of each robotic hand configuration on the postural synergies subspace is evaluated:
23 Grasping Control with Postural Synergies hand configuration for the i-th grasp computed as interpolation of the weight values in three configurations zero offset open hand desired grasp (object dependent)

24 Control with Postural Synergies Power grasps Precision grasps Intermediate grasps Synthesized grasps
25 Differential Kinematics Synergies Framework for Design and Control of Underactuated Artificial Hands 25/37 Differemtial mapping between Mechanical Synergies Space and Cartesian Space Mechanical Synergies Jacobian Hand Jacobian Differential mappingbetween Mechanical Synergies Space and Joint Space Fingertips Position Joint Angles Motor Variables


26 Control in the Synergies Subspace Synergies Framework for Design and Control of Underactuated Artificial Hands 26/37 Neuroscience Studies human beings realize grasping actions by means of first phase of pre-shaping exploiting synergies learning strategies and vision second phase of adaptation to the object that requires mainly contact forces sensory information



27 Control in the Synergies Subspace feedforward term for hand pre-shaping the configuration selected within the data-set used for synergies computation on the basis of the similarities related to the object shape and size, and to the grasp type, namely power, precision or lateral grasp local adaptation realized in a synergy-based framework exploiting force and position feedback grasp optimization synergy-based quality index relying on force closure property current regulation to avoid high contact forces




28 Experimental Results Synergies and Underactuation: Learning and Control Strategies for Anthropomorphic Hands 28/37 F. Ficuciello, A. Federico, V. Lippiello, B. Siciliano, Synergies Evaluation of the SCHUNK S5FH for Grasping Control, ARK 2016
Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University
 ASIAN SYMPOSIUM ON Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University APRIL 20, 2018 TOKYO INSTITUTE OF TECHNOLOGY Invited Speakers Dr.
ASIAN SYMPOSIUM ON Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University APRIL 20, 2018 TOKYO INSTITUTE OF TECHNOLOGY Invited Speakers Dr.
Thesis Rehabilitation robotics (RIA) Robotics for Bioengineering Forefront research at PRISMA Lab and ICAROS Center
 Robotics for Bioengineering Forefront research at PRISMA Lab and ICAROS Center") Thesis Rehabilitation robotics (RIA) RIA-1. Mechanical design of sensorized and under-actuated artificial hands with simulation and/or prototype tests The thesis work involves the study of kinematics of
Thesis Rehabilitation robotics (RIA) RIA-1. Mechanical design of sensorized and under-actuated artificial hands with simulation and/or prototype tests The thesis work involves the study of kinematics of
Kinematic and Dynamic Adaptation of
 Humanoids 2008 Workshop on Imitation and Coaching in Humanoid Robots Kinematic and Dynamic Adaptation of Human Motion for Imitation Katsu Yamane Disney Research, Pittsburgh Carnegie Mellon University Programming
Humanoids 2008 Workshop on Imitation and Coaching in Humanoid Robots Kinematic and Dynamic Adaptation of Human Motion for Imitation Katsu Yamane Disney Research, Pittsburgh Carnegie Mellon University Programming
Electromyogram Synergy Control of a Dexterous Artificial Hand to Unscrew and Screw Objects
 The University of Akron IdeaExchange@UAkron Mechanical Engineering Faculty Research Mechanical Engineering Department 2014 Electromyogram Synergy Control of a Dexterous Artificial Hand to Unscrew and Screw
The University of Akron IdeaExchange@UAkron Mechanical Engineering Faculty Research Mechanical Engineering Department 2014 Electromyogram Synergy Control of a Dexterous Artificial Hand to Unscrew and Screw
Restoring Communication and Mobility
 Restoring Communication and Mobility What are they? Artificial devices connected to the body that substitute, restore or supplement a sensory, cognitive, or motive function of the nervous system that has
Restoring Communication and Mobility What are they? Artificial devices connected to the body that substitute, restore or supplement a sensory, cognitive, or motive function of the nervous system that has
Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger Yasuhisa Hasegawa, Yasuyuki Mikami,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger Yasuhisa Hasegawa, Yasuyuki Mikami,
Implantable Microelectronic Devices
 ECE 8803/4803 Implantable Microelectronic Devices Fall - 2015 Maysam Ghovanloo (mgh@gatech.edu) School of Electrical and Computer Engineering Georgia Institute of Technology 2015 Maysam Ghovanloo 1 Outline
ECE 8803/4803 Implantable Microelectronic Devices Fall - 2015 Maysam Ghovanloo (mgh@gatech.edu) School of Electrical and Computer Engineering Georgia Institute of Technology 2015 Maysam Ghovanloo 1 Outline
The Physiology of the Senses Chapter 8 - Muscle Sense
 The Physiology of the Senses Chapter 8 - Muscle Sense www.tutis.ca/senses/ Contents Objectives... 1 Introduction... 2 Muscle Spindles and Golgi Tendon Organs... 3 Gamma Drive... 5 Three Spinal Reflexes...
The Physiology of the Senses Chapter 8 - Muscle Sense www.tutis.ca/senses/ Contents Objectives... 1 Introduction... 2 Muscle Spindles and Golgi Tendon Organs... 3 Gamma Drive... 5 Three Spinal Reflexes...
Brain-computer interface to transform cortical activity to control signals for prosthetic arm
 Brain-computer interface to transform cortical activity to control signals for prosthetic arm Artificial neural network Spinal cord challenge: getting appropriate control signals from cortical neurons
Brain-computer interface to transform cortical activity to control signals for prosthetic arm Artificial neural network Spinal cord challenge: getting appropriate control signals from cortical neurons
The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE
 SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is a rehabilitation
SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is a rehabilitation
The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE
 GLOREHA SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is
GLOREHA SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is
An Overview of BMIs. Luca Rossini. Workshop on Brain Machine Interfaces for Space Applications
 An Overview of BMIs Luca Rossini Workshop on Brain Machine Interfaces for Space Applications European Space Research and Technology Centre, European Space Agency Noordvijk, 30 th November 2009 Definition
An Overview of BMIs Luca Rossini Workshop on Brain Machine Interfaces for Space Applications European Space Research and Technology Centre, European Space Agency Noordvijk, 30 th November 2009 Definition
ArteSImit: Artefact Structural Learning through Imitation
 ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
ECHORD call1 experiment MAAT
 ECHORD call1 experiment MAAT Multimodal interfaces to improve therapeutic outcomes in robot-assisted rehabilitation Loredana Zollo, Antonino Salerno, Eugenia Papaleo, Eugenio Guglielmelli (1) Carlos Pérez,
ECHORD call1 experiment MAAT Multimodal interfaces to improve therapeutic outcomes in robot-assisted rehabilitation Loredana Zollo, Antonino Salerno, Eugenia Papaleo, Eugenio Guglielmelli (1) Carlos Pérez,
Neurostyle. Medical Innovation for Better Life
 Neurostyle Medical Innovation for Better Life Neurostyle Pte Ltd is a company dedicated to design, develop, manufacture and distribute neurological and neuromuscular medical devices. Strategically located
Neurostyle Medical Innovation for Better Life Neurostyle Pte Ltd is a company dedicated to design, develop, manufacture and distribute neurological and neuromuscular medical devices. Strategically located
Neurorobotics, and brain-machine interfaces. Oct. 10 th, 2006.
 Neurorobotics, and brain-machine interfaces Oct. 10 th, 2006. Catching up from last class Pg 121 Wessberg ( ) Nicolelis, Real-time prediction of hand trajectory by ensembles of cortical neurons in primates
Neurorobotics, and brain-machine interfaces Oct. 10 th, 2006. Catching up from last class Pg 121 Wessberg ( ) Nicolelis, Real-time prediction of hand trajectory by ensembles of cortical neurons in primates
Learning Modules - Medical Gross Anatomy Nervous System Overview - Page 1 of 14
 Nervous System Overview - Page 1 of 14 Overview of the Nervous System Every minute of every day, your nervous system is sending and receiving countless messages about what is happening both inside and
Nervous System Overview - Page 1 of 14 Overview of the Nervous System Every minute of every day, your nervous system is sending and receiving countless messages about what is happening both inside and
Cortical Control of Movement
 Strick Lecture 2 March 24, 2006 Page 1 Cortical Control of Movement Four parts of this lecture: I) Anatomical Framework, II) Physiological Framework, III) Primary Motor Cortex Function and IV) Premotor
Strick Lecture 2 March 24, 2006 Page 1 Cortical Control of Movement Four parts of this lecture: I) Anatomical Framework, II) Physiological Framework, III) Primary Motor Cortex Function and IV) Premotor
NeuroOrthopaedics upper extremities
 NeuroOrthopaedics upper extremities Medical devices for deficiencies in the arm-shoulder-hand region Information for practitioners Effectively supporting rehabilitation of the hand and shoulder Strokes
NeuroOrthopaedics upper extremities Medical devices for deficiencies in the arm-shoulder-hand region Information for practitioners Effectively supporting rehabilitation of the hand and shoulder Strokes
Of Monkeys and. Nick Annetta
 Of Monkeys and Men Nick Annetta Outline Why neuroprosthetics? Biological background 2 groups University of Reading University of Pittsburgh Conclusions Why Neuroprosthetics? Amputations Paralysis Spinal
Of Monkeys and Men Nick Annetta Outline Why neuroprosthetics? Biological background 2 groups University of Reading University of Pittsburgh Conclusions Why Neuroprosthetics? Amputations Paralysis Spinal
Robot control using electromyography (EMG) signals of the wrist
 signals of the wrist") Robot control using electromyography (EMG) signals of the wrist C. DaSalla,J.Kim and Y. Koike,2 Tokyo Institute of Technology, R2-5, 4259 Nagatsuta-cho, Midori-ku, Yokohama 226-853, Japan 2 CREST, Japan
Robot control using electromyography (EMG) signals of the wrist C. DaSalla,J.Kim and Y. Koike,2 Tokyo Institute of Technology, R2-5, 4259 Nagatsuta-cho, Midori-ku, Yokohama 226-853, Japan 2 CREST, Japan
Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI /s
 14:121 DOI /s") Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI 10.1186/s12984-017-0320-4 RESEARCH Restoration of motor control and proprioceptive and cutaneous sensation in humans with
Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI 10.1186/s12984-017-0320-4 RESEARCH Restoration of motor control and proprioceptive and cutaneous sensation in humans with
Introduction to Computational Neuroscience
 Introduction to Computational Neuroscience Lecture 10: Brain-Computer Interfaces Ilya Kuzovkin So Far Stimulus So Far So Far Stimulus What are the neuroimaging techniques you know about? Stimulus So Far
Introduction to Computational Neuroscience Lecture 10: Brain-Computer Interfaces Ilya Kuzovkin So Far Stimulus So Far So Far Stimulus What are the neuroimaging techniques you know about? Stimulus So Far
The Handmaster NMS1 surface FES neuroprosthesis in hemiplegic patients
 The Handmaster NMS1 surface FES neuroprosthesis in hemiplegic patients R. H. Nathan 1,2, H. P. Weingarden 1,3, A. Dar 1,2, A. Prager 1 1 NESS Neuromuscular Electrical Stimulation Systems Ltd. 2 Biomedical
The Handmaster NMS1 surface FES neuroprosthesis in hemiplegic patients R. H. Nathan 1,2, H. P. Weingarden 1,3, A. Dar 1,2, A. Prager 1 1 NESS Neuromuscular Electrical Stimulation Systems Ltd. 2 Biomedical
Biomechanics (part 2)
") Biomechanics (part 2) MCE 493/593 & ECE 492/592 Prosthesis Design and Control September 11, 214 Antonie J. (Ton) van den Bogert Mechanical Engineering Cleveland State University 1 Today Coupling between
Biomechanics (part 2) MCE 493/593 & ECE 492/592 Prosthesis Design and Control September 11, 214 Antonie J. (Ton) van den Bogert Mechanical Engineering Cleveland State University 1 Today Coupling between
Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop. Ed Chadwick Keele University Staffordshire, UK.
 Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop Control Applications Ed Chadwick Keele University Staffordshire, UK. Acknowledgements Dimitra Blana, Keele University, Staffordshire, UK.
Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop Control Applications Ed Chadwick Keele University Staffordshire, UK. Acknowledgements Dimitra Blana, Keele University, Staffordshire, UK.
Research & Development of Rehabilitation Technology in Singapore
 Research & Development of Rehabilitation Technology in Singapore ANG Wei Tech Associate Professor School of Mechanical & Aerospace Engineering wtang@ntu.edu.sg Assistive Technology Technologists / Engineers
Research & Development of Rehabilitation Technology in Singapore ANG Wei Tech Associate Professor School of Mechanical & Aerospace Engineering wtang@ntu.edu.sg Assistive Technology Technologists / Engineers
Hybrid BCI for people with Duchenne muscular dystrophy
 Hybrid BCI for people with Duchenne muscular dystrophy François Cabestaing Rennes, September 7th 2017 2 / 13 BCI timeline 1929 - Electroencephalogram (Berger) 1965 - Discovery of cognitive evoked potentials
Hybrid BCI for people with Duchenne muscular dystrophy François Cabestaing Rennes, September 7th 2017 2 / 13 BCI timeline 1929 - Electroencephalogram (Berger) 1965 - Discovery of cognitive evoked potentials
Hand of Hope. For hand rehabilitation. Member of Vincent Medical Holdings Limited
 Hand of Hope For hand rehabilitation Member of Vincent Medical Holdings Limited Over 17 Million people worldwide suffer a stroke each year A stroke is the largest cause of a disability with half of all
Hand of Hope For hand rehabilitation Member of Vincent Medical Holdings Limited Over 17 Million people worldwide suffer a stroke each year A stroke is the largest cause of a disability with half of all
What is NBS? Nextstim NBS System
 Nextstim NBS System What is NBS? NBS means navigated brain stimulation, and is used to precisely map the areas controlling muscle movements/activity in the brain. This procedure provides advanced patient
Nextstim NBS System What is NBS? NBS means navigated brain stimulation, and is used to precisely map the areas controlling muscle movements/activity in the brain. This procedure provides advanced patient
Outline. UCF Efforts related to Biomedical Engineering
 Date 4/27/2017 1 Outline UCF Efforts related to Biomedical Engineering Masters of Science in Biomedical Engineering Prosthetics Cluster MEDD (Medical Engineering Biomedical) Program Senior Design Efforts
Date 4/27/2017 1 Outline UCF Efforts related to Biomedical Engineering Masters of Science in Biomedical Engineering Prosthetics Cluster MEDD (Medical Engineering Biomedical) Program Senior Design Efforts
VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND
 VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND Daniel Aukes Barrett Heyneman Mark Cutkosky Mechanical Engineering Stanford University, USA Vincent Duchaine Mechanical Engineering
VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND Daniel Aukes Barrett Heyneman Mark Cutkosky Mechanical Engineering Stanford University, USA Vincent Duchaine Mechanical Engineering
A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics
 A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics Marc G. Carmichael Submitted in fulfillment of the requirement for the degree of Doctor of Philosophy 2013 The Faculty
A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics Marc G. Carmichael Submitted in fulfillment of the requirement for the degree of Doctor of Philosophy 2013 The Faculty
Squid: Exercise Effectiveness and. Muscular Activation Tracking
 1 Squid: Exercise Effectiveness and Muscular Activation Tracking Design Team Trevor Lorden, Adam Morgan, Kyle Peters, Joseph Sheehan, Thomas Wilbur Interactive Media Alexandra Aas, Alexandra Moran, Amy
1 Squid: Exercise Effectiveness and Muscular Activation Tracking Design Team Trevor Lorden, Adam Morgan, Kyle Peters, Joseph Sheehan, Thomas Wilbur Interactive Media Alexandra Aas, Alexandra Moran, Amy
Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute of Engineering and Technology, India
 Design of an Extremely Affordable and Zero Maintenance Mechanical Secondary Finger (S-finger) Prosthesis for Index Finger Amputees Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute
Design of an Extremely Affordable and Zero Maintenance Mechanical Secondary Finger (S-finger) Prosthesis for Index Finger Amputees Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute
Electroencephalograms and Neuro-Rehabilitation. Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University
 Electroencephalograms and Neuro-Rehabilitation Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University chanhl@mail.cgu.edu.tw Brain Cerebrum ( 大腦 ) Receives and processes conscious sensation
Electroencephalograms and Neuro-Rehabilitation Hsiao-Lung Chan Dept Electrical Engineering Chang Gung University chanhl@mail.cgu.edu.tw Brain Cerebrum ( 大腦 ) Receives and processes conscious sensation
DELSYS. Purpose. Hardware Concepts. Software Concepts. Technical Note 101: EMG Sensor Placement
 Technical Note 101: EMG Sensor Placement Purpose This technical note addresses proper placement technique for Delsys Surface EMG Sensors. The technique is demonstrated through an experiment in which EMG
Technical Note 101: EMG Sensor Placement Purpose This technical note addresses proper placement technique for Delsys Surface EMG Sensors. The technique is demonstrated through an experiment in which EMG
Reach and grasp by people with tetraplegia using a neurally controlled robotic arm
 Leigh R. Hochberg et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm Nature, 17 May 2012 Paper overview Ilya Kuzovkin 11 April 2014, Tartu etc How it works?
Leigh R. Hochberg et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm Nature, 17 May 2012 Paper overview Ilya Kuzovkin 11 April 2014, Tartu etc How it works?
ABSTRACT. Title of Document: SENSORY FEEDBACK MODULATES MAXIMUM VOLUNTARY FORCE IN MULTI-FINGER PRESSING. Sohit Karol, PhD., 2012
 ABSTRACT Title of Document: SENSORY FEEDBACK MODULATES MAXIMUM VOLUNTARY FORCE IN MULTI-FINGER PRESSING Sohit Karol, PhD., 2012 Directed By: Dr. Jae Kun Shim, Department of Kinesiology The human hand is
ABSTRACT Title of Document: SENSORY FEEDBACK MODULATES MAXIMUM VOLUNTARY FORCE IN MULTI-FINGER PRESSING Sohit Karol, PhD., 2012 Directed By: Dr. Jae Kun Shim, Department of Kinesiology The human hand is
Glabella. Continuously Sensing Blood Pressure Behavior using an Unobtrusive Wearable Device. Christian Holz Edward Wang Microsoft Research
 Glabella Continuously Sensing Blood Pressure Behavior using an Unobtrusive Wearable Device Christian Holz Edward Wang Microsoft Research Glabella continuously records the pulse at 3 locations, pulse transit
Glabella Continuously Sensing Blood Pressure Behavior using an Unobtrusive Wearable Device Christian Holz Edward Wang Microsoft Research Glabella continuously records the pulse at 3 locations, pulse transit
PD233: Design of Biomedical Devices and Systems
 PD233: Design of Biomedical Devices and Systems (Lecture-7 Biopotentials- 2) Dr. Manish Arora CPDM, IISc Course Website: http://cpdm.iisc.ac.in/utsaah/courses/ Electromyogram (EMG) Skeletal muscles are
PD233: Design of Biomedical Devices and Systems (Lecture-7 Biopotentials- 2) Dr. Manish Arora CPDM, IISc Course Website: http://cpdm.iisc.ac.in/utsaah/courses/ Electromyogram (EMG) Skeletal muscles are
The Nervous System SBI4U
 SBI4U The Nervous System Central Nervous System (CNS): consists of the brain and spinal cord Acts as the coordinating centre for incoming and outgoing information Peripheral Nervous System (PNS): consists
SBI4U The Nervous System Central Nervous System (CNS): consists of the brain and spinal cord Acts as the coordinating centre for incoming and outgoing information Peripheral Nervous System (PNS): consists
3-DOF Parallel robotics System for Foot Drop therapy using Arduino
 3-DOF Parallel robotics System for Foot Drop therapy using Arduino Prof. Dr. Bahaa I Kazem, Assist.Prof.Dr Ameer Morad, Kamal Mohammed Hasan Baghdad University, Baghdad, Iraq Abstract This paper discusses
3-DOF Parallel robotics System for Foot Drop therapy using Arduino Prof. Dr. Bahaa I Kazem, Assist.Prof.Dr Ameer Morad, Kamal Mohammed Hasan Baghdad University, Baghdad, Iraq Abstract This paper discusses
Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove To cite this article: M X Lin et al 2018 IOP Conf. Ser.:
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove To cite this article: M X Lin et al 2018 IOP Conf. Ser.:
REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING
 XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING Edwardo Arata Y. Murakami 1 1 Digital
XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING Edwardo Arata Y. Murakami 1 1 Digital
Guide to the use of nerve conduction studies (NCS) & electromyography (EMG) for non-neurologists
 & electromyography (EMG) for non-neurologists") Guide to the use of nerve conduction studies (NCS) & electromyography (EMG) for non-neurologists What is NCS/EMG? NCS examines the conduction properties of sensory and motor peripheral nerves. For both
Guide to the use of nerve conduction studies (NCS) & electromyography (EMG) for non-neurologists What is NCS/EMG? NCS examines the conduction properties of sensory and motor peripheral nerves. For both
Chapter Six Review Sections 1 and 2
 NAME PER DATE Chapter Six Review Sections 1 and 2 Matching: 1. afferent nerves 2. autonomic nervous system 3. cell body 4. central nervous system (CNS) 5. dendrites 6. efferent nerves 7. myelin sheath
NAME PER DATE Chapter Six Review Sections 1 and 2 Matching: 1. afferent nerves 2. autonomic nervous system 3. cell body 4. central nervous system (CNS) 5. dendrites 6. efferent nerves 7. myelin sheath
master thesis of Michele Folgheraiter, Politecnico di Milano
 master thesis of Michele Folgheraiter, Politecnico di Milano Seminario organizzato nell ambito del programma ENEA-MURST, progetto SIRO, da Giuseppina Gini INTRODUCTION The human hand has been well studied
master thesis of Michele Folgheraiter, Politecnico di Milano Seminario organizzato nell ambito del programma ENEA-MURST, progetto SIRO, da Giuseppina Gini INTRODUCTION The human hand has been well studied
Degree of freedom problem
 KINE 4500 Neural Control of Movement Lecture #1:Introduction to the Neural Control of Movement Neural control of movement Kinesiology: study of movement Here we re looking at the control system, and what
KINE 4500 Neural Control of Movement Lecture #1:Introduction to the Neural Control of Movement Neural control of movement Kinesiology: study of movement Here we re looking at the control system, and what
The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function
 The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function Raviraj Nataraj, Peter J. Evans, MD, PhD, William H. Seitz, MD, Zong-Ming Li. Cleveland Clinic, Cleveland, OH, USA. Disclosures:
The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function Raviraj Nataraj, Peter J. Evans, MD, PhD, William H. Seitz, MD, Zong-Ming Li. Cleveland Clinic, Cleveland, OH, USA. Disclosures:
Carnegie Mellon University Annual Progress Report: 2011 Formula Grant
 Carnegie Mellon University Annual Progress Report: 2011 Formula Grant Reporting Period January 1, 2012 June 30, 2012 Formula Grant Overview The Carnegie Mellon University received $943,032 in formula funds
Carnegie Mellon University Annual Progress Report: 2011 Formula Grant Reporting Period January 1, 2012 June 30, 2012 Formula Grant Overview The Carnegie Mellon University received $943,032 in formula funds
KINE 4500 Neural Control of Movement. Lecture #1:Introduction to the Neural Control of Movement. Neural control of movement
 KINE 4500 Neural Control of Movement Lecture #1:Introduction to the Neural Control of Movement Neural control of movement Kinesiology: study of movement Here we re looking at the control system, and what
KINE 4500 Neural Control of Movement Lecture #1:Introduction to the Neural Control of Movement Neural control of movement Kinesiology: study of movement Here we re looking at the control system, and what
Biceps Activity EMG Pattern Recognition Using Neural Networks
 Biceps Activity EMG Pattern Recognition Using eural etworks K. Sundaraj University Malaysia Perlis (UniMAP) School of Mechatronic Engineering 0600 Jejawi - Perlis MALAYSIA kenneth@unimap.edu.my Abstract:
Biceps Activity EMG Pattern Recognition Using eural etworks K. Sundaraj University Malaysia Perlis (UniMAP) School of Mechatronic Engineering 0600 Jejawi - Perlis MALAYSIA kenneth@unimap.edu.my Abstract:
Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
 The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 4-7, 0 Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 4-7, 0 Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
Estimation of the Upper Limb Lifting Movement Under Varying Weight and Movement Speed
 1 Sungyoon Lee, 1 Jaesung Oh, 1 Youngwon Kim, 1 Minsuk Kwon * Jaehyo Kim 1 Department of mechanical & control engineering, Handong University, qlfhlxhl@nate.com * Department of mechanical & control engineering,
1 Sungyoon Lee, 1 Jaesung Oh, 1 Youngwon Kim, 1 Minsuk Kwon * Jaehyo Kim 1 Department of mechanical & control engineering, Handong University, qlfhlxhl@nate.com * Department of mechanical & control engineering,
A Patient s Guide to Intraoperative Monitoring
 A Patient s Guide to Intraoperative Monitoring 228 West Main, Suite C Missoula, MT 59802 Phone: info@spineuniversity.com DISCLAIMER: The information in this booklet is compiled from a variety of sources.
A Patient s Guide to Intraoperative Monitoring 228 West Main, Suite C Missoula, MT 59802 Phone: info@spineuniversity.com DISCLAIMER: The information in this booklet is compiled from a variety of sources.
Bioscience in the 21st century
 Bioscience in the 21st century Lecture 2: Innovations and Challenges Dr. Michael Burger Outline: Review of last lecture Organization of the nervous system (in brief) The mapping concept Bionic implants
Bioscience in the 21st century Lecture 2: Innovations and Challenges Dr. Michael Burger Outline: Review of last lecture Organization of the nervous system (in brief) The mapping concept Bionic implants
How we study the brain: a survey of methods used in neuroscience
 How we study the brain: a survey of methods used in neuroscience Preparing living neurons for recording Large identifiable neurons in a leech Rohon-Beard neurons in a frog spinal cord Living slice of a
How we study the brain: a survey of methods used in neuroscience Preparing living neurons for recording Large identifiable neurons in a leech Rohon-Beard neurons in a frog spinal cord Living slice of a
Operator tooling for the Touch-up Procedure
 Operator tooling for the Touch-up Procedure Current State Current Process: After the printing process is complete part of the gold ink is not connected and the operator is required to touch-up this portion
Operator tooling for the Touch-up Procedure Current State Current Process: After the printing process is complete part of the gold ink is not connected and the operator is required to touch-up this portion
Neural Basis of Motor Control
 Neural Basis of Motor Control Central Nervous System Skeletal muscles are controlled by the CNS which consists of the brain and spinal cord. Determines which muscles will contract When How fast To what
Neural Basis of Motor Control Central Nervous System Skeletal muscles are controlled by the CNS which consists of the brain and spinal cord. Determines which muscles will contract When How fast To what
Adult Nervous System
 Adult Nervous System What is the capacity of the PNS and CNS for repair? WHY? Why discuss this now? Potential for repair depends on cellular properties of nerve and glial cells. http://neuroscience.uth.tmc.edu/s1/chapter09.html
Adult Nervous System What is the capacity of the PNS and CNS for repair? WHY? Why discuss this now? Potential for repair depends on cellular properties of nerve and glial cells. http://neuroscience.uth.tmc.edu/s1/chapter09.html
Mechanosensation. Central Representation of Touch. Wilder Penfield. Somatotopic Organization
 Mechanosensation Central Representation of Touch Touch and tactile exploration Vibration and pressure sensations; important for clinical testing Limb position sense John H. Martin, Ph.D. Center for Neurobiology
Mechanosensation Central Representation of Touch Touch and tactile exploration Vibration and pressure sensations; important for clinical testing Limb position sense John H. Martin, Ph.D. Center for Neurobiology
Strick Lecture 1 March 22, 2006 Page 1
 Strick Lecture 1 March 22, 2006 Page 1 Motor Planning and Programming The point of this lecture is to reveal important features about the operation of our motor system by studying motor behavior. Figures
Strick Lecture 1 March 22, 2006 Page 1 Motor Planning and Programming The point of this lecture is to reveal important features about the operation of our motor system by studying motor behavior. Figures
Robotic Leg Control with EMG Decoding in an Amputee with Nerve Transfers
 T h e n e w e ngl a nd j o u r na l o f m e dic i n e brief report Robotic Leg Control with EMG Decoding in an Amputee with Nerve Transfers Levi J. Hargrove, Ph.D., Ann M. Simon, Ph.D., Aaron J. Young,
T h e n e w e ngl a nd j o u r na l o f m e dic i n e brief report Robotic Leg Control with EMG Decoding in an Amputee with Nerve Transfers Levi J. Hargrove, Ph.D., Ann M. Simon, Ph.D., Aaron J. Young,
An electrooptical muscle contraction sensor. Alessio Chianura and Mario E Giardini. Medical and Biological Engineering and Computing 48 (2010)
") An electrooptical muscle contraction sensor Alessio Chianura and Mario E Giardini Medical and Biological Engineering and Computing 48 (2010) 731-734 This is an author-generated version The final publication
An electrooptical muscle contraction sensor Alessio Chianura and Mario E Giardini Medical and Biological Engineering and Computing 48 (2010) 731-734 This is an author-generated version The final publication
When mind meets machine
 Adverti Will off-the-shelf body parts routinely replace injured or diseased tissue? Today, there's no one person who has all the gear shown in this Science cover illustration - but such thoroughly bionic
Adverti Will off-the-shelf body parts routinely replace injured or diseased tissue? Today, there's no one person who has all the gear shown in this Science cover illustration - but such thoroughly bionic
EI2311 BIOMEDICAL INSTRUMENTATION
 66 EI2311 BIOMEDICAL INSTRUMENTATION 1. What is meant by cell? UNIT I PHYSIOLOGY AND TRANSDUCERS The basic living unit of the body is cell. The function of organs and other structure of the body is understood
66 EI2311 BIOMEDICAL INSTRUMENTATION 1. What is meant by cell? UNIT I PHYSIOLOGY AND TRANSDUCERS The basic living unit of the body is cell. The function of organs and other structure of the body is understood
The Nervous System. Functions of the Nervous System input gathering To monitor occurring inside and outside the body Changes =
 The Nervous System Functions of the Nervous System input gathering To monitor occurring inside and outside the body Changes = To process and sensory input and decide if is needed output A response to integrated
The Nervous System Functions of the Nervous System input gathering To monitor occurring inside and outside the body Changes = To process and sensory input and decide if is needed output A response to integrated
Omo and Manu Neurexa plus
 Omo and Manu Neurexa plus Promote movement. Stay independent. Information for specialists Omo and Manu Neurexa plus Effectively supporting rehabilitation of the hand and shoulder The devices in the Neurexa
Omo and Manu Neurexa plus Promote movement. Stay independent. Information for specialists Omo and Manu Neurexa plus Effectively supporting rehabilitation of the hand and shoulder The devices in the Neurexa
راما ندى أسامة الخضر. Faisal Muhammad
 22 راما ندى أسامة الخضر Faisal Muhammad Revision Last time we started talking about sensory receptors, we defined them and talked about the mechanism of their reaction. Now we will talk about sensory receptors,
22 راما ندى أسامة الخضر Faisal Muhammad Revision Last time we started talking about sensory receptors, we defined them and talked about the mechanism of their reaction. Now we will talk about sensory receptors,
Brain and Spine Curing Spinal Cord Injury (Dr. Labhasetwar) Summary: Stroke Therapy (Dr. Labhasetwar)
 Summary: Stroke Therapy (Dr. Labhasetwar)") Brain and Spine Curing Spinal Cord Injury (Dr. Labhasetwar) Spinal cord injury (SCI) has devastating consequences on those affected, for the rest of their lives. According to the Christopher & Dana Reeve
Brain and Spine Curing Spinal Cord Injury (Dr. Labhasetwar) Spinal cord injury (SCI) has devastating consequences on those affected, for the rest of their lives. According to the Christopher & Dana Reeve
Chapter 7. The Nervous System
 Chapter 7 The Nervous System General overview of the nervous system functions Sensory input (info travels in along afferent pathways) Integration (information is processed) Sensory neurons Spinal cord
Chapter 7 The Nervous System General overview of the nervous system functions Sensory input (info travels in along afferent pathways) Integration (information is processed) Sensory neurons Spinal cord
Massage Lounger HEC-DR8700. Experience ultimate comfort for the body and mind.
 Massage Lounger HEC-DR8700 Experience ultimate comfort for the body and mind. How the most advanced sensor technology can enhance massage. Human beings can suffer from both physical and mental fatigue.
Massage Lounger HEC-DR8700 Experience ultimate comfort for the body and mind. How the most advanced sensor technology can enhance massage. Human beings can suffer from both physical and mental fatigue.
Applied Neuroscience. Conclusion of Science Honors Program Spring 2017
 Applied Neuroscience Conclusion of Science Honors Program Spring 2017 Review Circle whichever is greater, A or B. If A = B, circle both: I. A. permeability of a neuronal membrane to Na + during the rise
Applied Neuroscience Conclusion of Science Honors Program Spring 2017 Review Circle whichever is greater, A or B. If A = B, circle both: I. A. permeability of a neuronal membrane to Na + during the rise
Q: What is the relationship between muscle forces and EMG data that we have collected?
 FAQs ABOUT OPENSIM Q: What is the relationship between muscle forces and EMG data that we have collected? A: Muscle models in OpenSim generate force based on three parameters: activation, muscle fiber
FAQs ABOUT OPENSIM Q: What is the relationship between muscle forces and EMG data that we have collected? A: Muscle models in OpenSim generate force based on three parameters: activation, muscle fiber
ABSTRACT ON USER PERFORMANCE THROUGH A PROSTHETIC INTERFACE. Isabelle M. Shuggi, Master of Science, 2014
 ABSTRACT Title of Document: THE EFFECT OF A SAFETY CONTROLLER ON USER PERFORMANCE THROUGH A PROSTHETIC INTERFACE Isabelle M. Shuggi, Master of Science, 2014 Directed By: Associate Professor Jeffrey W.
ABSTRACT Title of Document: THE EFFECT OF A SAFETY CONTROLLER ON USER PERFORMANCE THROUGH A PROSTHETIC INTERFACE Isabelle M. Shuggi, Master of Science, 2014 Directed By: Associate Professor Jeffrey W.
Anatomy, Biomechanics, Work Physiology, and Anthropometry. After completing and understanding of the current chapter students should be able to:
 Chapter 2 Anatomy, Biomechanics, Work Physiology, and Anthropometry Learning outcomes: After completing and understanding of the current chapter students should be able to: Describe the anatomical structure
Chapter 2 Anatomy, Biomechanics, Work Physiology, and Anthropometry Learning outcomes: After completing and understanding of the current chapter students should be able to: Describe the anatomical structure
The Nervous System 7PART A. PowerPoint Lecture Slide Presentation by Patty Bostwick-Taylor, Florence-Darlington Technical College
 PowerPoint Lecture Slide Presentation by Patty Bostwick-Taylor, Florence-Darlington Technical College The Nervous System 7PART A Functions of the Nervous System Sensory input gathering information To monitor
PowerPoint Lecture Slide Presentation by Patty Bostwick-Taylor, Florence-Darlington Technical College The Nervous System 7PART A Functions of the Nervous System Sensory input gathering information To monitor
sensory input receptors integration Human Anatomy motor output Ch. 7 effectors Structural classification
 Human Anatomy Ch. 7 I. The Nervous System A. General characteristics 1. body s control & communication center a. 3 overlapping functions 1) sensory input: receptors monitor stimuli 2) integration: processes,
Human Anatomy Ch. 7 I. The Nervous System A. General characteristics 1. body s control & communication center a. 3 overlapping functions 1) sensory input: receptors monitor stimuli 2) integration: processes,
A Decision Method for the Placement of Tactile Sensors for Manipulation Task Recognition
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 A Decision Method for the Placement of Tactile Sensors for Manipulation Task Recognition Kazuya Matsuo,
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 A Decision Method for the Placement of Tactile Sensors for Manipulation Task Recognition Kazuya Matsuo,
Detection of Neuromuscular Diseases Using Surface Electromyograms
 Faculty of Electrical Engineering and Computer Science University of Maribor 1 Department of Computer Science, University of Cyprus 2 The Cyprus Institute of Neurology and Genetics 3 Detection of Neuromuscular
Faculty of Electrical Engineering and Computer Science University of Maribor 1 Department of Computer Science, University of Cyprus 2 The Cyprus Institute of Neurology and Genetics 3 Detection of Neuromuscular
By Pure Thought Alone:
 p r o g r e s s r e p o r t s By Pure Thought Alone: The Development of the First Cognitive Neural Prosthesis by Joel W. Burdick and Richard A. Andersen Many of us have probably had this fantasy: just
p r o g r e s s r e p o r t s By Pure Thought Alone: The Development of the First Cognitive Neural Prosthesis by Joel W. Burdick and Richard A. Andersen Many of us have probably had this fantasy: just
Chapter 34 The Nervous System:
 Chapter 34 The Nervous System: 3.5 Learning Objectives 3.5.3 Responses in the human 1. The nervous system: two-part division into the CNS and the PNS. 2. Neurons, name 3 types, give structure and function
Chapter 34 The Nervous System: 3.5 Learning Objectives 3.5.3 Responses in the human 1. The nervous system: two-part division into the CNS and the PNS. 2. Neurons, name 3 types, give structure and function
Lumbar Spine, L-S junction and semg 2/26/08
 Lumbar Spine, L-S junction and semg 2/26/08 EMG What is EMG? EMG stands for electromyography. It is the study of muscle electrical signals. EMG is sometimes referred to as myoelectric activity. How is
Lumbar Spine, L-S junction and semg 2/26/08 EMG What is EMG? EMG stands for electromyography. It is the study of muscle electrical signals. EMG is sometimes referred to as myoelectric activity. How is
PSY 310: Sensory and Perceptual Processes 1
 Touch PSY 310 Greg Francis Lecture 34 Why can t you tickle yourself? Touch receptors Last time we talked about the mechanoreceptors involved touch perception It is important to remember that touch is a
Touch PSY 310 Greg Francis Lecture 34 Why can t you tickle yourself? Touch receptors Last time we talked about the mechanoreceptors involved touch perception It is important to remember that touch is a
Touch PSY 310 Greg Francis. Lecture 34. Touch receptors
 Touch PSY 310 Greg Francis Lecture 34 Why can t you tickle yourself? Touch receptors Last time we talked about the mechanoreceptors involved touch perception It is important to remember that touch is a
Touch PSY 310 Greg Francis Lecture 34 Why can t you tickle yourself? Touch receptors Last time we talked about the mechanoreceptors involved touch perception It is important to remember that touch is a
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Excitation-Contraction Coupling & Reflexes, Proprioception and Movement. PSK 4U Unit 4, Day 4
 Excitation-Contraction Coupling & Reflexes, Proprioception and Movement PSK 4U Unit 4, Day 4 Excitation-Contraction Coupling Muscles work by converting electrical and chemical energy into mechanical energy!
Excitation-Contraction Coupling & Reflexes, Proprioception and Movement PSK 4U Unit 4, Day 4 Excitation-Contraction Coupling Muscles work by converting electrical and chemical energy into mechanical energy!
The Nervous System S P I N A L R E F L E X E S
 The Nervous System S P I N A L R E F L E X E S Reflexes Rapid, involuntary, predictable motor response to a stimulus Spinal Reflexes Spinal somatic reflexes Integration center is in the spinal cord Effectors
The Nervous System S P I N A L R E F L E X E S Reflexes Rapid, involuntary, predictable motor response to a stimulus Spinal Reflexes Spinal somatic reflexes Integration center is in the spinal cord Effectors
The Thigh Corset: Its Effects on the Quadriceps Muscle and its Role in Prosthetic Suspension
 The Thigh Corset: Its Effects on the Quadriceps Muscle and its Role in Prosthetic Suspension Joe Weiss, M.D. L. Middleton, M.D. E. Gonzalez, M.D. R.E. Lovelace, M.D. The present study aims at evaluating
The Thigh Corset: Its Effects on the Quadriceps Muscle and its Role in Prosthetic Suspension Joe Weiss, M.D. L. Middleton, M.D. E. Gonzalez, M.D. R.E. Lovelace, M.D. The present study aims at evaluating
The ADL Force 5 configured for knee testing
 The ADL Force 5 configured for knee testing Description The AMTI Force 5 is a versatile simulator that can be configured for a variety of single and multiaxis tests, such as joint simulation, product testing,
The ADL Force 5 configured for knee testing Description The AMTI Force 5 is a versatile simulator that can be configured for a variety of single and multiaxis tests, such as joint simulation, product testing,
Electroencephalography
 The electroencephalogram (EEG) is a measure of brain waves. It is a readily available test that provides evidence of how the brain functions over time. The EEG is used in the evaluation of brain disorders.
The electroencephalogram (EEG) is a measure of brain waves. It is a readily available test that provides evidence of how the brain functions over time. The EEG is used in the evaluation of brain disorders.
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence
 Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Control of Finger Forces during Fast, Slow and Moderate Rotational Hand Movements
 Control of Finger Forces during Fast, Slow and Moderate Rotational Hand Movements Hamed Kazemi, Robert E. Kearney, IEEE Fellow, and Theodore E. Milner, IEEE Member Abstract The goal of this study was to
Control of Finger Forces during Fast, Slow and Moderate Rotational Hand Movements Hamed Kazemi, Robert E. Kearney, IEEE Fellow, and Theodore E. Milner, IEEE Member Abstract The goal of this study was to
MCAT Biology Problem Drill 18: The Muscular System
 MCAT Biology Problem Drill 18: The Muscular System Question No. 1 of 10 Question 1. Which statement about muscles is correct? Question #01 A. Muscles have an origin that is usually attached to a movable
MCAT Biology Problem Drill 18: The Muscular System Question No. 1 of 10 Question 1. Which statement about muscles is correct? Question #01 A. Muscles have an origin that is usually attached to a movable
Nervous System. The Peripheral Nervous System Agenda Review of CNS v. PNS PNS Basics Cranial Nerves Spinal Nerves Reflexes Pathways
 Nervous System Agenda Review of CNS v. PNS PNS Basics Cranial Nerves Spinal Nerves Sensory Motor Review of CNS v. PNS Central nervous system (CNS) Brain Spinal cord Peripheral nervous system (PNS) All
Nervous System Agenda Review of CNS v. PNS PNS Basics Cranial Nerves Spinal Nerves Sensory Motor Review of CNS v. PNS Central nervous system (CNS) Brain Spinal cord Peripheral nervous system (PNS) All
WHAT ARE THE FUNCTIONS OF THE NERVOUS SYSTEM?
 THE NERVOUS SYSTEM LEARNING OBJECTIVES To state the function of the Nervous system. To describe the structure and workings of the nervous system. To name the major parts of the nervous system. To describe
THE NERVOUS SYSTEM LEARNING OBJECTIVES To state the function of the Nervous system. To describe the structure and workings of the nervous system. To name the major parts of the nervous system. To describe
Redefining Neurorehab. Improve Function. Maximize Independence. Enhance Quality of Life.
 Redefining Neurorehab Improve Function. Maximize Independence. Enhance Quality of Life. What is MyndMove? MyndMove is the first therapy to deliver significant lasting voluntary upper extremity function
Redefining Neurorehab Improve Function. Maximize Independence. Enhance Quality of Life. What is MyndMove? MyndMove is the first therapy to deliver significant lasting voluntary upper extremity function
Nervous System: Spinal Cord and Spinal Nerves (Chapter 13)
") Nervous System: Spinal Cord and Spinal Nerves (Chapter 13) Lecture Materials for Amy Warenda Czura, Ph.D. Suffolk County Community College Eastern Campus Primary Sources for figures and content: Marieb,
Nervous System: Spinal Cord and Spinal Nerves (Chapter 13) Lecture Materials for Amy Warenda Czura, Ph.D. Suffolk County Community College Eastern Campus Primary Sources for figures and content: Marieb,