Thesis Rehabilitation robotics (RIA) Robotics for Bioengineering Forefront research at PRISMA Lab and ICAROS Center
|
|
|
- Nickolas Hudson
- 5 years ago
- Views:
Transcription
1 Thesis Rehabilitation robotics (RIA)




2 RIA-1. Mechanical design of sensorized and under-actuated artificial hands with simulation and/or prototype tests The thesis work involves the study of kinematics of artificial hands and motion transmission mechanisms with the aim of mechanically implementing motion synergies. The work involves also hand sensorization using tactile sensors or alternatively current sensors at the motors to adjust contact forces. Introducing compliance in the mechanical structure is another aspect to be pursued. Thumb kinematics design Optimal number of motors we are investigating a solution with three motors Compliance at the joints Tactile sensors FBG technology, Optoelectronic technology Proximity sensors Arduino, 3D Printing, Software CAD (SolidWorks, Solid Edge, AutoCAD), Electronic prototype manufacturing, optoelectronic technology University of Campania "Luigi Vanvitelli" Aversa (Prof. Natale, Prof. Pirozzi) Tactile sensors FabLab Città della Scienza (Chiara Maiorino) Mechatronics, Manufacturing
3 Optimal number of motors investigating solutions with 3 motors 1st actuation: For the thumb rotation joint. The joint is directly and independently driven 2nd actuation: For the thumb flexion/extension. The thumb is underactuated and elastic materials integrated at the distal joint 3rd actuation: For finger flexion/extension The four fingers can be differentially driven by a multi-stage differential mechanism. Various differential mechanism can be utilized, like pulley, linkage or continuum mechanism The object Thumb I/M/R/L 1st actuation Thumb rotation L R M I L R M I 2nd actuation Thumb Flexion 3rd actuation Finger flexions T 3rd actuation Finger flexions 2nd actuation Thumb Flexion 1st actuation Thumb rotation pulley-based multi-stage differential mechanism Springs 3rd actuation Finger flexions compliant transmission based on springs
4 Compliance at the joints Hybrid Manufacturing of the Prisma Hand II a b c d e f g Gives the hand flexible and durable structure. All the compliant materials can be manufacture (flexible joint and tactile sensors) by one casting All the procedures can be done in the lab by ourselves, with some common equipment Due to the elastic joints, it is hard to exactly model the hand. Therefore, it offers a hand prototype to experiment new control methods (e. g. adaptive control) A step closer to soft robotics research, which is a hot topic with a lot of unsolved problem


5 RIA-2. Development of a hand simulator to optimize mechanical design and EMG control design of an anthropomorphic hand A study will be carried out on the association of the electromyographic signals to the motor skills of the human hand to interface the measured signals to different combinations of motor positions of the artificial hand. The objective is a smart activation of motor synergies to grasp different types of objects. Study of muscular synergies and coupling with robot hand motor synergies (design of motion transmission) EMG signal classification (PCA, LDA) V-REP, Communication interface, Matlab Artificial Neural Network(ANN), fuzzy classifier, Linear Discriminant Analysis (LDA), Self Organizing Map (SOM) and Support Vector Machines (SVM), FabLab Città della Scienza (Chiara Maiorino) Mechatronics, Manufacturing

6 RIA-3. Development of autonomous control modules for prostheses based on biomedical signals and device s proprioceptive sensors The thesis project foresees the development and implementation of control strategies based on electromyographic signals and shared control modalities merging EMG-based control and sensory feedback control. Development of a multimodal interface for hand control (electronic board) Sensor-based control strategies (force regulation, synergies activation) Shared control Arduino, EMG signal elaboration and classification, Voice control board, synergy-based control, kinematic control, C++ programming Second University of University of Campania "Luigi Vanvitelli" Aversa (Prof. Natale, Prof. Pirozzi) Tactile sensors FabLab Città della Scienza (Chiara Maiorino) Mechatronics, Manufacturing

 Sensor-based control strategies (variable impedance control) Human intention interpretation KUKA LWR")
7 RIA-4. Development of shared control strategies for rehabilitation and assistance systems The thesis will focus on the development of multimodal control interface involving motion tracking, voice command, EMG signals to develop shared control modalities for robotic assistance and rehabilitation Development of a multimodal interface for robot control (software integration of EMG signals, voice signals, robot control libraries) Sensor-based control strategies (variable impedance control) Human intention interpretation KUKA LWR Arm ROS, EMG signal elaboration and classification, Voice control board, Impedance control, C++ programming Fondazione Santa Lucia (Dott. Marco Molinari) IIT Genova (Prof. Darwin Caldwell)




8 RIA-5. Motion analysis for bimanual tasks The objective of the thesis is to measure human bimanual motion using a biokinetic suite and motion tracking systems, and to analyze the motion using statistical techniques for dimensionality reduction. Taxonomy of bimanual tasks Arm and hand tracking Dimesionality reduction of different configuration spaces Development of synergy-based cotrol strategies Xsense suite, Vicon, C++ programming, MATLAB, dimensionality reduction technique: Gaussian Mixture Models, LDA, PCA



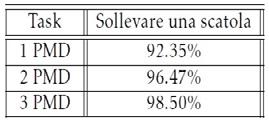
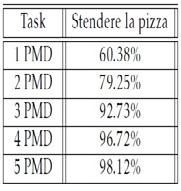


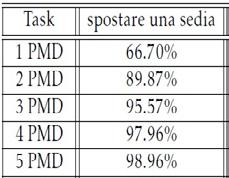
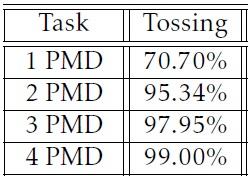
9 Bimanual taxonomy and synergies
10 Thesis Surgical robotics (CHI)




11 CHI-1. Control algorithms based on multimodal visual information and image processing The objective of the thesis is to develop (semi-)autonomous control strategies for cutting and suturing based on tools detection and tracking, and on tissue deformation tracking. Detection and tracking of surgical tools by means of sensory fusion (position, vision) Tracking of deformable object/organs and structures Interaction force estimation using visual information Da Vinci Research Kit, cameras, stereo endoscope, Open CV, Kalman Filter, ROS, SOFA simulator Image processing software and methods INRIA Prof. Antoine Petit
Control principles in upper-limb prostheses
 Control principles in upper-limb prostheses electromyographic (EMG) signals generated by muscle contractions electroneurographic (ENG) signals interface with the peripheral nervous system (PNS) interface
Control principles in upper-limb prostheses electromyographic (EMG) signals generated by muscle contractions electroneurographic (ENG) signals interface with the peripheral nervous system (PNS) interface
Navigator: 2 Degree of Freedom Robotics Hand Rehabilitation Device
 Navigator: 2 Degree of Freedom Robotics Hand Rehabilitation Device Design Team Ray Adler, Katherine Bausemer, Joseph Gonsalves, Patrick Murphy, Kevin Thompson Design Advisors Prof. Constantinos Mavroidis,
Navigator: 2 Degree of Freedom Robotics Hand Rehabilitation Device Design Team Ray Adler, Katherine Bausemer, Joseph Gonsalves, Patrick Murphy, Kevin Thompson Design Advisors Prof. Constantinos Mavroidis,
KINEMATIC ANALYSIS OF ELBOW REHABILITATION EQUIPMENT
 Bulletin of the Transilvania University of Braşov Vol. 10 (59) No. 2-2017 Series I: Engineering Sciences KINEMATIC ANALYSIS OF ELBOW REHABILITATION EQUIPMENT G. VETRICE 1 A. DEACONESCU 1 Abstract: The
Bulletin of the Transilvania University of Braşov Vol. 10 (59) No. 2-2017 Series I: Engineering Sciences KINEMATIC ANALYSIS OF ELBOW REHABILITATION EQUIPMENT G. VETRICE 1 A. DEACONESCU 1 Abstract: The
Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove To cite this article: M X Lin et al 2018 IOP Conf. Ser.:
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design and Dynamic Modeling of Flexible Rehabilitation Mechanical Glove To cite this article: M X Lin et al 2018 IOP Conf. Ser.:
Outline. UCF Efforts related to Biomedical Engineering
 Date 4/27/2017 1 Outline UCF Efforts related to Biomedical Engineering Masters of Science in Biomedical Engineering Prosthetics Cluster MEDD (Medical Engineering Biomedical) Program Senior Design Efforts
Date 4/27/2017 1 Outline UCF Efforts related to Biomedical Engineering Masters of Science in Biomedical Engineering Prosthetics Cluster MEDD (Medical Engineering Biomedical) Program Senior Design Efforts
SIMULATOR FOR TESTING THE FRICTION TORQUE OF THE FEMORAL HEAD OF A HIP PROSTHESIS
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences SIMULATOR FOR TESTING THE FRICTION TORQUE OF THE FEMORAL HEAD OF A HIP PROSTHESIS S. MIHAI 1 V. FILIP
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences SIMULATOR FOR TESTING THE FRICTION TORQUE OF THE FEMORAL HEAD OF A HIP PROSTHESIS S. MIHAI 1 V. FILIP
MAGIC F4A (FEX for All)
") Meet the Supplier Event Ancona March 22, 2017 MAGIC F4A (FEX for All) Danieli tlabs in a nutshell Robot and advanced machines for special applications From conceptual design to on site installation and
Meet the Supplier Event Ancona March 22, 2017 MAGIC F4A (FEX for All) Danieli tlabs in a nutshell Robot and advanced machines for special applications From conceptual design to on site installation and
Smart. Training. Developing advanced exercise machines
 PAGE 24 CUSTOMERS Developing advanced exercise machines Smart Training Researchers from Cleveland State University are developing new kinds of exercise machines for athletic conditioning, rehabilitation
PAGE 24 CUSTOMERS Developing advanced exercise machines Smart Training Researchers from Cleveland State University are developing new kinds of exercise machines for athletic conditioning, rehabilitation
M.Sc. in Cognitive Systems. Model Curriculum
 M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING
 XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING Edwardo Arata Y. Murakami 1 1 Digital
XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal REACTION TIME MEASUREMENT APPLIED TO MULTIMODAL HUMAN CONTROL MODELING Edwardo Arata Y. Murakami 1 1 Digital
VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND
 VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND Daniel Aukes Barrett Heyneman Mark Cutkosky Mechanical Engineering Stanford University, USA Vincent Duchaine Mechanical Engineering
VARYING SPRING PRELOADS TO SELECT GRASP STRATEGIES IN AN ADAPTIVE HAND Daniel Aukes Barrett Heyneman Mark Cutkosky Mechanical Engineering Stanford University, USA Vincent Duchaine Mechanical Engineering
Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University
 ASIAN SYMPOSIUM ON Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University APRIL 20, 2018 TOKYO INSTITUTE OF TECHNOLOGY Invited Speakers Dr.
ASIAN SYMPOSIUM ON Motor Control in Biomechanics In Honor of Prof. T. Kiryu s retirement from rich academic career at Niigata University APRIL 20, 2018 TOKYO INSTITUTE OF TECHNOLOGY Invited Speakers Dr.
Reach and grasp by people with tetraplegia using a neurally controlled robotic arm
 Leigh R. Hochberg et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm Nature, 17 May 2012 Paper overview Ilya Kuzovkin 11 April 2014, Tartu etc How it works?
Leigh R. Hochberg et al. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm Nature, 17 May 2012 Paper overview Ilya Kuzovkin 11 April 2014, Tartu etc How it works?
MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES
 MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES Marc Manz, Sebastian Bartsch, and Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovation Center Director: Prof. Dr. Frank
MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES Marc Manz, Sebastian Bartsch, and Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovation Center Director: Prof. Dr. Frank
Analyzing Hand Therapy Success in a Web-Based Therapy System
 Analyzing Hand Therapy Success in a Web-Based Therapy System Ahmed Elnaggar 1, Dirk Reichardt 1 Intelligent Interaction Lab, Computer Science Department, DHBW Stuttgart 1 Abstract After an injury, hand
Analyzing Hand Therapy Success in a Web-Based Therapy System Ahmed Elnaggar 1, Dirk Reichardt 1 Intelligent Interaction Lab, Computer Science Department, DHBW Stuttgart 1 Abstract After an injury, hand
VIDEO SURVEILLANCE AND BIOMEDICAL IMAGING Research Activities and Technology Transfer at PAVIS
 VIDEO SURVEILLANCE AND BIOMEDICAL IMAGING Research Activities and Technology Transfer at PAVIS Samuele Martelli, Alessio Del Bue, Diego Sona, Vittorio Murino Istituto Italiano di Tecnologia (IIT), Genova
VIDEO SURVEILLANCE AND BIOMEDICAL IMAGING Research Activities and Technology Transfer at PAVIS Samuele Martelli, Alessio Del Bue, Diego Sona, Vittorio Murino Istituto Italiano di Tecnologia (IIT), Genova
ECHORD call1 experiment MAAT
 ECHORD call1 experiment MAAT Multimodal interfaces to improve therapeutic outcomes in robot-assisted rehabilitation Loredana Zollo, Antonino Salerno, Eugenia Papaleo, Eugenio Guglielmelli (1) Carlos Pérez,
ECHORD call1 experiment MAAT Multimodal interfaces to improve therapeutic outcomes in robot-assisted rehabilitation Loredana Zollo, Antonino Salerno, Eugenia Papaleo, Eugenio Guglielmelli (1) Carlos Pérez,
A Vision-based Affective Computing System. Jieyu Zhao Ningbo University, China
 A Vision-based Affective Computing System Jieyu Zhao Ningbo University, China Outline Affective Computing A Dynamic 3D Morphable Model Facial Expression Recognition Probabilistic Graphical Models Some
A Vision-based Affective Computing System Jieyu Zhao Ningbo University, China Outline Affective Computing A Dynamic 3D Morphable Model Facial Expression Recognition Probabilistic Graphical Models Some
2282. Design of a bionic-inspired exoskeleton robot for lower limb assist
 2282. Design of a bionic-inspired exoskeleton robot for lower limb assist Yun-Ping Sun 1, Shuo-Ching Chen 2, Yen-Chu Liang 3, Lung-Nan Wu 4 1 Department of Mechanical Engineering, Cheng Shiu University,
2282. Design of a bionic-inspired exoskeleton robot for lower limb assist Yun-Ping Sun 1, Shuo-Ching Chen 2, Yen-Chu Liang 3, Lung-Nan Wu 4 1 Department of Mechanical Engineering, Cheng Shiu University,
CIMIT. The Simulation CIMIT. Past & current projects. Past & current projects. The Simulation Group. ICTS Architecture.
 CIMIT The Simulation Group @ CIMIT Stephane Cotin cotin.stephane@mgh.harvard.edu CIMIT Simulation Group / Harvard Medical School http://simcen.usuhs.mil/miccai2003 CIMIT (Center for Integration of Medicine
CIMIT The Simulation Group @ CIMIT Stephane Cotin cotin.stephane@mgh.harvard.edu CIMIT Simulation Group / Harvard Medical School http://simcen.usuhs.mil/miccai2003 CIMIT (Center for Integration of Medicine
human-centered exoskeleton design
 The webcast will start in a few minutes. Simulations as a tool for human-centered exoskeleton design Date 28 th Feb 2018 Outline Brief introduction Today s webcast: Simulations and exoskeleton design AnyBody
The webcast will start in a few minutes. Simulations as a tool for human-centered exoskeleton design Date 28 th Feb 2018 Outline Brief introduction Today s webcast: Simulations and exoskeleton design AnyBody
Motion Control for Social Behaviours
 Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Hand of Hope. For hand rehabilitation. Member of Vincent Medical Holdings Limited
 Hand of Hope For hand rehabilitation Member of Vincent Medical Holdings Limited Over 17 Million people worldwide suffer a stroke each year A stroke is the largest cause of a disability with half of all
Hand of Hope For hand rehabilitation Member of Vincent Medical Holdings Limited Over 17 Million people worldwide suffer a stroke each year A stroke is the largest cause of a disability with half of all
Variability and Predictability in Tactile Sensing During Grasping
 Variability and Predictability in Tactile Sensing During Grasping Qian Wan, Ryan P. Adams, Robert D. Howe Abstract Robotic manipulation in unstructured environments requires grasping a wide range of objects.
Variability and Predictability in Tactile Sensing During Grasping Qian Wan, Ryan P. Adams, Robert D. Howe Abstract Robotic manipulation in unstructured environments requires grasping a wide range of objects.
DEVELOPMENT OF WEARABLE MASTER-SLAVE TRAINING DEVICE FOR UPPER LIMB CONSTRUCTED WITH PNEUMATIC ARTIFICIAL MUSCLES
 DEVELOPMENT OF WEARABLE MASTER-SLAVE TRAINING DEVICE FOR UPPER LIMB CONSTRUCTED WITH PNEUMATIC ARTIFICIAL MUSCLES Daisuke SASAKI*, Toshiro NORITSUGU* and Masahiro TAKAIWA* * Graduate School of Natural
DEVELOPMENT OF WEARABLE MASTER-SLAVE TRAINING DEVICE FOR UPPER LIMB CONSTRUCTED WITH PNEUMATIC ARTIFICIAL MUSCLES Daisuke SASAKI*, Toshiro NORITSUGU* and Masahiro TAKAIWA* * Graduate School of Natural
Robot Grippers. Gareth J. Monkman, Stefan Hesse, RalfSteinmann, Henrik Schunk. WILEY-VCH Verlag GmbH & Co. KGaA : 2007 ~ ~1807n - >
 Gareth J. Monkman, Stefan Hesse, RalfSteinmann, Henrik Schunk Robot Grippers. 8ICENTI
Gareth J. Monkman, Stefan Hesse, RalfSteinmann, Henrik Schunk Robot Grippers. 8ICENTI
Is Motion Planning Overrated? Jeannette Bohg - Interactive Perception and Robot Learning Lab - Stanford
 Is Motion Planning Overrated? Jeannette Bohg - Interactive Perception and Robot Learning Lab - Stanford Is Motion Planning Overrated? Jeannette Bohg - Interactive Perception and Robot Learning Lab - Stanford
Is Motion Planning Overrated? Jeannette Bohg - Interactive Perception and Robot Learning Lab - Stanford Is Motion Planning Overrated? Jeannette Bohg - Interactive Perception and Robot Learning Lab - Stanford
Neural Facilitation in MRI via Pneumatically Driven, Tele-Operated Systems
 Neural Facilitation in MRI via Pneumatically Driven, Tele-Operated Systems Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University
Neural Facilitation in MRI via Pneumatically Driven, Tele-Operated Systems Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University
Torbjørn S. Dahl and Andrew Palmer Robotic Intelligence Lab, University of Wales, Newport GEMBENCH10 Workshop EURON/EUROP Annual Meeting San
 Human Motion as a Benchmark for Humanoid Behaviour Torbjørn S. Dahl and Andrew Palmer Robotic Intelligence Lab, University of Wales, Newport GEMBENCH10 Workshop EURON/EUROP Annual Meeting San Sebastian,
Human Motion as a Benchmark for Humanoid Behaviour Torbjørn S. Dahl and Andrew Palmer Robotic Intelligence Lab, University of Wales, Newport GEMBENCH10 Workshop EURON/EUROP Annual Meeting San Sebastian,
Robot control using electromyography (EMG) signals of the wrist
 signals of the wrist") Robot control using electromyography (EMG) signals of the wrist C. DaSalla,J.Kim and Y. Koike,2 Tokyo Institute of Technology, R2-5, 4259 Nagatsuta-cho, Midori-ku, Yokohama 226-853, Japan 2 CREST, Japan
Robot control using electromyography (EMG) signals of the wrist C. DaSalla,J.Kim and Y. Koike,2 Tokyo Institute of Technology, R2-5, 4259 Nagatsuta-cho, Midori-ku, Yokohama 226-853, Japan 2 CREST, Japan
Exoskeletons: Reducing joint and muscle loads while performing difficult tasks
 Exoskeletons: Reducing joint and muscle loads while performing difficult tasks The web cast will start in a few minutes. Amir Al-Munajjed, Moonki Jung AnyBody Technology Outline: Who & what is AnyBody?
Exoskeletons: Reducing joint and muscle loads while performing difficult tasks The web cast will start in a few minutes. Amir Al-Munajjed, Moonki Jung AnyBody Technology Outline: Who & what is AnyBody?
Minimally Invasive Surgery Tool. Team Members: Sujan Bhaheetharan (BWIG) Ashley Huth (BSAC) Max Michalski (Communicator) Brenton Nelson (Leader)
 Ashley Huth (BSAC) Max Michalski (Communicator) Brenton Nelson (Leader)") Minimally Invasive Surgery Tool October 18 th, 2005 Team Members: Sujan Bhaheetharan (BWIG) Ashley Huth (BSAC) Max Michalski (Communicator) Brenton Nelson (Leader) Client: Aimen F. Shaaban, M.D. Assistant
Minimally Invasive Surgery Tool October 18 th, 2005 Team Members: Sujan Bhaheetharan (BWIG) Ashley Huth (BSAC) Max Michalski (Communicator) Brenton Nelson (Leader) Client: Aimen F. Shaaban, M.D. Assistant
Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
 The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 4-7, 0 Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 4-7, 0 Wearable Hand Rehabilitation Robot Capable of Hand Function Assistance in Stroke Survivors*
Simulator Based Experimental Motion Analysis of 3D Printed Artificial Shoulder Joint Geometries
 EPiC Series in Health Sciences Volume 1, 2017, Pages 82 87 CAOS 2017. 17th Annual Meeting of the International Society for Computer Assisted Orthopaedic Surgery Health Sciences Simulator Based Experimental
EPiC Series in Health Sciences Volume 1, 2017, Pages 82 87 CAOS 2017. 17th Annual Meeting of the International Society for Computer Assisted Orthopaedic Surgery Health Sciences Simulator Based Experimental
Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger Yasuhisa Hasegawa, Yasuyuki Mikami,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Five-Fingered Assistive Hand with Mechanical Compliance of Human Finger Yasuhisa Hasegawa, Yasuyuki Mikami,
Design of a compact, dexterous robot hand with remotely located actuators and sensors
 Design of a compact, dexterous robot hand with remotely located actuators and sensors Michael A. Saliba* and Maria Axiak Department of Manufacturing Engineering, University of Malta, Msida, Malta *Email:
Design of a compact, dexterous robot hand with remotely located actuators and sensors Michael A. Saliba* and Maria Axiak Department of Manufacturing Engineering, University of Malta, Msida, Malta *Email:
COMPUTER PLAY IN EDUCATIONAL THERAPY FOR CHILDREN WITH STUTTERING PROBLEM: HARDWARE SETUP AND INTERVENTION
 034 - Proceeding of the Global Summit on Education (GSE2013) COMPUTER PLAY IN EDUCATIONAL THERAPY FOR CHILDREN WITH STUTTERING PROBLEM: HARDWARE SETUP AND INTERVENTION ABSTRACT Nur Azah Hamzaid, Ammar
034 - Proceeding of the Global Summit on Education (GSE2013) COMPUTER PLAY IN EDUCATIONAL THERAPY FOR CHILDREN WITH STUTTERING PROBLEM: HARDWARE SETUP AND INTERVENTION ABSTRACT Nur Azah Hamzaid, Ammar
Smart Suit Lite: KEIROKA TechnologyPaper Title
 Smart Suit Lite: KEIROKA TechnologyPaper Title Takayuki Tanaka Hokkaido University Graduate School of Information Science and Technology Sapporo-city, Japan ttanaka@ssi.ist.hokudai.ac.jp Youmeko Imamura
Smart Suit Lite: KEIROKA TechnologyPaper Title Takayuki Tanaka Hokkaido University Graduate School of Information Science and Technology Sapporo-city, Japan ttanaka@ssi.ist.hokudai.ac.jp Youmeko Imamura
Brain-computer interface to transform cortical activity to control signals for prosthetic arm
 Brain-computer interface to transform cortical activity to control signals for prosthetic arm Artificial neural network Spinal cord challenge: getting appropriate control signals from cortical neurons
Brain-computer interface to transform cortical activity to control signals for prosthetic arm Artificial neural network Spinal cord challenge: getting appropriate control signals from cortical neurons
Introduction to ROS. Lasse Einig, Dennis Krupke, Florens Wasserfall
 Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 7, 2016 L.
Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 7, 2016 L.
Towards a Fully Passive Transfemoral Prosthesis for Normal Walking
 The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Towards a Fully Passive Transfemoral Prosthesis for Normal Walking R. Unal, R.
The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Towards a Fully Passive Transfemoral Prosthesis for Normal Walking R. Unal, R.
Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute of Engineering and Technology, India
 Design of an Extremely Affordable and Zero Maintenance Mechanical Secondary Finger (S-finger) Prosthesis for Index Finger Amputees Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute
Design of an Extremely Affordable and Zero Maintenance Mechanical Secondary Finger (S-finger) Prosthesis for Index Finger Amputees Etrouth Srikar 1, Habib Ali 2 1, 2 Dept. Biomedical Engineering, J.B Institute
TheraSuit Orthosis I. The History and Development of TheraSuit :
 -- www.genius4kids.com -- TheraSuit Orthosis I. The History and Development of TheraSuit : TheraSuit, a soft, dynamic, proprioceptive orthotic, is a full-featured dynamic correction clothing. The invention
-- www.genius4kids.com -- TheraSuit Orthosis I. The History and Development of TheraSuit : TheraSuit, a soft, dynamic, proprioceptive orthotic, is a full-featured dynamic correction clothing. The invention
Development of a 6DOF Exoskeleton Robot for Human Upper-Limb Motion Assist
 Development of a 6DOF Exoskeleton Robot for Human Upper-Limb Motion Assist R. A. R. C. Gopura + and Kazuo Kiguchi ++ Department of Advanced Systems Control Engineering Saga University, Saga, Japan 840-8502
Development of a 6DOF Exoskeleton Robot for Human Upper-Limb Motion Assist R. A. R. C. Gopura + and Kazuo Kiguchi ++ Department of Advanced Systems Control Engineering Saga University, Saga, Japan 840-8502
COURSE OUTLINE. School of Engineering Technology and Applied Science. Biomedical Engineering Technology. Biomechanics & Rehabilitation
 COURSE OUTLINE SCHOOL: School of Engineering Technology and Applied Science DEPARTMENT: Information and Communication Engineering Technology (ICET) PROGRAM: Biomedical Engineering Technology COURSE TITLE:
COURSE OUTLINE SCHOOL: School of Engineering Technology and Applied Science DEPARTMENT: Information and Communication Engineering Technology (ICET) PROGRAM: Biomedical Engineering Technology COURSE TITLE:
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Humerus. Ulna. Radius. Carpals
 Posture Analysis Exercise T. Armstrong M. Ebersole 1.0 Objectives: 1. Improve skill for rating over all job and identifying specific force and posture problems 2. Learn how to characterize posture 3. Learn
Posture Analysis Exercise T. Armstrong M. Ebersole 1.0 Objectives: 1. Improve skill for rating over all job and identifying specific force and posture problems 2. Learn how to characterize posture 3. Learn
Neuroinformatics. Ilmari Kurki, Urs Köster, Jukka Perkiö, (Shohei Shimizu) Interdisciplinary and interdepartmental
 Interdisciplinary and interdepartmental") Neuroinformatics Aapo Hyvärinen, still Academy Research Fellow for a while Post-docs: Patrik Hoyer and Jarmo Hurri + possibly international post-docs PhD students Ilmari Kurki, Urs Köster, Jukka Perkiö,
Neuroinformatics Aapo Hyvärinen, still Academy Research Fellow for a while Post-docs: Patrik Hoyer and Jarmo Hurri + possibly international post-docs PhD students Ilmari Kurki, Urs Köster, Jukka Perkiö,
Lecture 2 BME 599: Modeling & Simulation of Movement
 Simulation Lab #1 Lecture 2 Question of the Day How high can you jump without an approach or swinging your arms? How should you coordinate muscle forces to produce a maximum height jump? Outline for Today
Simulation Lab #1 Lecture 2 Question of the Day How high can you jump without an approach or swinging your arms? How should you coordinate muscle forces to produce a maximum height jump? Outline for Today
The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE
 SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is a rehabilitation
SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is a rehabilitation
What utility is there in distinguishing between active and passive touch? Jack M. Loomis and Susan J. Lederman
 What utility is there in distinguishing between active and passive touch? Jack M. Loomis and Susan J. Lederman University of California, Santa Barbara and Queen's University Paper presented at the Psychonomic
What utility is there in distinguishing between active and passive touch? Jack M. Loomis and Susan J. Lederman University of California, Santa Barbara and Queen's University Paper presented at the Psychonomic
Development of Ultrasound Based Techniques for Measuring Skeletal Muscle Motion
 Development of Ultrasound Based Techniques for Measuring Skeletal Muscle Motion Jason Silver August 26, 2009 Presentation Outline Introduction Thesis Objectives Mathematical Model and Principles Methods
Development of Ultrasound Based Techniques for Measuring Skeletal Muscle Motion Jason Silver August 26, 2009 Presentation Outline Introduction Thesis Objectives Mathematical Model and Principles Methods
TRAINING FOR SPORT MICHOL DALCOURT
 TRAINING FOR SPORT MICHOL DALCOURT LEARNING OBJECTIVES Understand the Demands of Sport Learn how to apply specific stability / strength / agility drills that will transfer to sport Learn about: vector
TRAINING FOR SPORT MICHOL DALCOURT LEARNING OBJECTIVES Understand the Demands of Sport Learn how to apply specific stability / strength / agility drills that will transfer to sport Learn about: vector
Sound Analysis Research at LabROSA
 Sound Analysis Research at LabROSA Dan Ellis Laboratory for Recognition and Organization of Speech and Audio Dept. Electrical Eng., Columbia Univ., NY USA dpwe@ee.columbia.edu http://labrosa.ee.columbia.edu/
Sound Analysis Research at LabROSA Dan Ellis Laboratory for Recognition and Organization of Speech and Audio Dept. Electrical Eng., Columbia Univ., NY USA dpwe@ee.columbia.edu http://labrosa.ee.columbia.edu/
Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI /s
 14:121 DOI /s") Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI 10.1186/s12984-017-0320-4 RESEARCH Restoration of motor control and proprioceptive and cutaneous sensation in humans with
Wendelken et al. Journal of NeuroEngineering and Rehabilitation (2017) 14:121 DOI 10.1186/s12984-017-0320-4 RESEARCH Restoration of motor control and proprioceptive and cutaneous sensation in humans with
The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE
 GLOREHA SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is
GLOREHA SINFONIA The device for upper limb rehabilitation that supports patients during all the phases of neuromotor recovery A COMFORTABLE AND LIGHTWEIGHT GLOVE The key feature of Gloreha Sinfonia is
Benchmarking grasps and hands
 Benchmarking grasps and hands Máximo A. Roa Institute of Robotics and Mechatronics German Aerospace Center - DLR IROS 2016 Workshop: Evaluation and Benchmarking of Underactuated and Soft Robotic Hands
Benchmarking grasps and hands Máximo A. Roa Institute of Robotics and Mechatronics German Aerospace Center - DLR IROS 2016 Workshop: Evaluation and Benchmarking of Underactuated and Soft Robotic Hands
The Physiology of the Senses Chapter 8 - Muscle Sense
 The Physiology of the Senses Chapter 8 - Muscle Sense www.tutis.ca/senses/ Contents Objectives... 1 Introduction... 2 Muscle Spindles and Golgi Tendon Organs... 3 Gamma Drive... 5 Three Spinal Reflexes...
The Physiology of the Senses Chapter 8 - Muscle Sense www.tutis.ca/senses/ Contents Objectives... 1 Introduction... 2 Muscle Spindles and Golgi Tendon Organs... 3 Gamma Drive... 5 Three Spinal Reflexes...
Gender Based Emotion Recognition using Speech Signals: A Review
 50 Gender Based Emotion Recognition using Speech Signals: A Review Parvinder Kaur 1, Mandeep Kaur 2 1 Department of Electronics and Communication Engineering, Punjabi University, Patiala, India 2 Department
50 Gender Based Emotion Recognition using Speech Signals: A Review Parvinder Kaur 1, Mandeep Kaur 2 1 Department of Electronics and Communication Engineering, Punjabi University, Patiala, India 2 Department
Design and Control of Robotic Systems for Lower Limb Stroke Rehabilitation
 Western University Scholarship@Western Electronic Thesis and Dissertation Repository August 2015 Design and Control of Robotic Systems for Lower Limb Stroke Rehabilitation Aaron Yurkewich The University
Western University Scholarship@Western Electronic Thesis and Dissertation Repository August 2015 Design and Control of Robotic Systems for Lower Limb Stroke Rehabilitation Aaron Yurkewich The University
Machines. Design, Modeling and Real-Time Control of Advanced Exercise
 Design, Modeling and Real-Time Control of Advanced Exercise Machines Hanz Richter, PhD, Professor of Mechanical Engineering Control, Robotics and Mechatronics Lab Cleveland State University Background
Design, Modeling and Real-Time Control of Advanced Exercise Machines Hanz Richter, PhD, Professor of Mechanical Engineering Control, Robotics and Mechatronics Lab Cleveland State University Background
ANTICIPATING DYNAMIC LOADS IN HANDLING OBJECTS.
 ANTICIPATING DYNAMIC LOADS IN HANDLING OBJECTS. Alan M. Wing Sensory Motor Neuroscience Centre, The University of Birmingham, Edgbaston, Birmingham, B15 2TT, UK. a.m.wing@bham.ac.uk J. Randall Flanagan
ANTICIPATING DYNAMIC LOADS IN HANDLING OBJECTS. Alan M. Wing Sensory Motor Neuroscience Centre, The University of Birmingham, Edgbaston, Birmingham, B15 2TT, UK. a.m.wing@bham.ac.uk J. Randall Flanagan
Index. average stress 146. see ACIS
 Index ACIS (autonomous catheter insertion system) 156, 237 39, 241 49 acute stroke treatment 59, 69, 71 anatomical model 88 aneurismal clipping treatment 106, 110 aneurysm 2 3, 26, 47 50, 52 55, 67 68,
Index ACIS (autonomous catheter insertion system) 156, 237 39, 241 49 acute stroke treatment 59, 69, 71 anatomical model 88 aneurismal clipping treatment 106, 110 aneurysm 2 3, 26, 47 50, 52 55, 67 68,
The Effect of Lateral Meniscal Root Injuries on the Stability of the Anterior Cruciate Ligament Deficient Knee
 The Effect of Lateral Meniscal Root Injuries on the Stability of the Anterior Cruciate Ligament Deficient Knee Charles Vega 1, Jebran Haddad 1, Jerry Alexander 2, Jonathan Gold 2, Theodore Shybut 1, Philip
The Effect of Lateral Meniscal Root Injuries on the Stability of the Anterior Cruciate Ligament Deficient Knee Charles Vega 1, Jebran Haddad 1, Jerry Alexander 2, Jonathan Gold 2, Theodore Shybut 1, Philip
Of Monkeys and. Nick Annetta
 Of Monkeys and Men Nick Annetta Outline Why neuroprosthetics? Biological background 2 groups University of Reading University of Pittsburgh Conclusions Why Neuroprosthetics? Amputations Paralysis Spinal
Of Monkeys and Men Nick Annetta Outline Why neuroprosthetics? Biological background 2 groups University of Reading University of Pittsburgh Conclusions Why Neuroprosthetics? Amputations Paralysis Spinal
Developing a Game-Based Proprioception Reconstruction System for Patients with Ankle Sprain
 Developing a Game-Based Proprioception Reconstruction System for Patients with Ankle Sprain Yu-Cheng Lin, Chung Shan Medical University, Taiwan Tzu-Fang Sheu, Providence University, Taiwan Hsiao Ping Lee,
Developing a Game-Based Proprioception Reconstruction System for Patients with Ankle Sprain Yu-Cheng Lin, Chung Shan Medical University, Taiwan Tzu-Fang Sheu, Providence University, Taiwan Hsiao Ping Lee,
ArteSImit: Artefact Structural Learning through Imitation
 ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
Design and Control of a Robotic Assistive Device for Hand Rehabilitation (RAD-HR)
") Proceedings of the 3 rd International Conference on Control, Dynamic Systems, and Robotics (CDSR 16) Ottawa, Canada May 9 10, 2016 Paper No. 109 DOI: 10.11159/cdsr16.109 Design and Control of a Robotic
Proceedings of the 3 rd International Conference on Control, Dynamic Systems, and Robotics (CDSR 16) Ottawa, Canada May 9 10, 2016 Paper No. 109 DOI: 10.11159/cdsr16.109 Design and Control of a Robotic
Squid: Exercise Effectiveness and. Muscular Activation Tracking
 1 Squid: Exercise Effectiveness and Muscular Activation Tracking Design Team Trevor Lorden, Adam Morgan, Kyle Peters, Joseph Sheehan, Thomas Wilbur Interactive Media Alexandra Aas, Alexandra Moran, Amy
1 Squid: Exercise Effectiveness and Muscular Activation Tracking Design Team Trevor Lorden, Adam Morgan, Kyle Peters, Joseph Sheehan, Thomas Wilbur Interactive Media Alexandra Aas, Alexandra Moran, Amy
Verification of Passive Power-Assist Device Using Humanoid Robot: Effect on Bending and Twisting Motion
 15 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) November 3-5, 15, Seoul, Korea Verification of Passive Power-Assist Device Using Humanoid Robot: Effect on Bending and Twisting
15 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) November 3-5, 15, Seoul, Korea Verification of Passive Power-Assist Device Using Humanoid Robot: Effect on Bending and Twisting
Gamified Music Learning System with VR Force Feedback for Rehabilitation
 Gamified Music Learning System with VR Force Feedback for Rehabilitation A Major Qualifying Project Submitted to the Faculty of Worcester Polytechnic Institute in partial fulfillment of the requirements
Gamified Music Learning System with VR Force Feedback for Rehabilitation A Major Qualifying Project Submitted to the Faculty of Worcester Polytechnic Institute in partial fulfillment of the requirements
DESIGNING AN IN-HOME SCALABLE ROBOTIC ARM EXOSKELETON FOR HAND REHABILITATION THERAPY
 DESIGNING AN IN-HOME SCALABLE ROBOTIC ARM EXOSKELETON FOR HAND REHABILITATION THERAPY A Thesis Presented to The Academic Faculty by Jonathan Tuck In Partial Fulfillment of the Requirements for the Degree
DESIGNING AN IN-HOME SCALABLE ROBOTIC ARM EXOSKELETON FOR HAND REHABILITATION THERAPY A Thesis Presented to The Academic Faculty by Jonathan Tuck In Partial Fulfillment of the Requirements for the Degree
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Electromyography II Laboratory (Hand Dynamometer Transducer)
") (Hand Dynamometer Transducer) Introduction As described in the Electromyography I laboratory session, electromyography (EMG) is an electrical signal that can be recorded with electrodes placed on the surface
(Hand Dynamometer Transducer) Introduction As described in the Electromyography I laboratory session, electromyography (EMG) is an electrical signal that can be recorded with electrodes placed on the surface
Contributions to Brain MRI Processing and Analysis
 Contributions to Brain MRI Processing and Analysis Dissertation presented to the Department of Computer Science and Artificial Intelligence By María Teresa García Sebastián PhD Advisor: Prof. Manuel Graña
Contributions to Brain MRI Processing and Analysis Dissertation presented to the Department of Computer Science and Artificial Intelligence By María Teresa García Sebastián PhD Advisor: Prof. Manuel Graña
Design and Modeling of an Upper Extremity Exoskeleton
 Design and Modeling of an Upper Extremity Exoskeleton Salam Moubarak, Minh Tu Pham, Thomas Pajdla, Tanneguy Redarce To cite this version: Salam Moubarak, Minh Tu Pham, Thomas Pajdla, Tanneguy Redarce.
Design and Modeling of an Upper Extremity Exoskeleton Salam Moubarak, Minh Tu Pham, Thomas Pajdla, Tanneguy Redarce To cite this version: Salam Moubarak, Minh Tu Pham, Thomas Pajdla, Tanneguy Redarce.
The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function
 The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function Raviraj Nataraj, Peter J. Evans, MD, PhD, William H. Seitz, MD, Zong-Ming Li. Cleveland Clinic, Cleveland, OH, USA. Disclosures:
The Effects of Carpal Tunnel Syndrome on the Kinematics of Reach-to-Pinch Function Raviraj Nataraj, Peter J. Evans, MD, PhD, William H. Seitz, MD, Zong-Ming Li. Cleveland Clinic, Cleveland, OH, USA. Disclosures:
A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics
 A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics Marc G. Carmichael Submitted in fulfillment of the requirement for the degree of Doctor of Philosophy 2013 The Faculty
A Musculoskeletal Model-based Assistance-As-Needed Paradigm for Assistive Robotics Marc G. Carmichael Submitted in fulfillment of the requirement for the degree of Doctor of Philosophy 2013 The Faculty
Application of Phased Array Radar Theory to Ultrasonic Linear Array Medical Imaging System
 Application of Phased Array Radar Theory to Ultrasonic Linear Array Medical Imaging System R. K. Saha, S. Karmakar, S. Saha, M. Roy, S. Sarkar and S.K. Sen Microelectronics Division, Saha Institute of
Application of Phased Array Radar Theory to Ultrasonic Linear Array Medical Imaging System R. K. Saha, S. Karmakar, S. Saha, M. Roy, S. Sarkar and S.K. Sen Microelectronics Division, Saha Institute of
Design Considerations of a Human Arm Exoskeleton
 , July 5-7, 2017, London, U.K. Design Considerations of a Human Arm Exoskeleton Dumitru S., Rosca A. S., Ciurezu L. and Didu A. Abstract Design considerations are reported for assistive human arm recovery
, July 5-7, 2017, London, U.K. Design Considerations of a Human Arm Exoskeleton Dumitru S., Rosca A. S., Ciurezu L. and Didu A. Abstract Design considerations are reported for assistive human arm recovery
Simultaneous Real-Time Detection of Motor Imagery and Error-Related Potentials for Improved BCI Accuracy
 Simultaneous Real-Time Detection of Motor Imagery and Error-Related Potentials for Improved BCI Accuracy P. W. Ferrez 1,2 and J. del R. Millán 1,2 1 IDIAP Research Institute, Martigny, Switzerland 2 Ecole
Simultaneous Real-Time Detection of Motor Imagery and Error-Related Potentials for Improved BCI Accuracy P. W. Ferrez 1,2 and J. del R. Millán 1,2 1 IDIAP Research Institute, Martigny, Switzerland 2 Ecole
A NOVEL ALGORITHM TO PREDICT KNEE ANGLE FROM EMG SIGNALS FOR CONTROLLING A LOWER LIMB EXOSKELETON
 A NOVEL ALGORITHM TO PREDICT KNEE ANGLE FROM EMG SIGNALS FOR CONTROLLING A LOWER LIMB EXOSKELETON Inderjeet Singh Dhindsa 1, Ravinder Agarwal 1, Hardeep Singh Ryait 2 1 EIED, Thapar University Patiala,
A NOVEL ALGORITHM TO PREDICT KNEE ANGLE FROM EMG SIGNALS FOR CONTROLLING A LOWER LIMB EXOSKELETON Inderjeet Singh Dhindsa 1, Ravinder Agarwal 1, Hardeep Singh Ryait 2 1 EIED, Thapar University Patiala,
Electromyogram-Assisted Upper Limb Rehabilitation Device
 Electromyogram-Assisted Upper Limb Rehabilitation Device Mikhail C. Carag, Adrian Joseph M. Garcia, Kathleen Mae S. Iniguez, Mikki Mariah C. Tan, Arthur Pius P. Santiago* Manufacturing Engineering and
Electromyogram-Assisted Upper Limb Rehabilitation Device Mikhail C. Carag, Adrian Joseph M. Garcia, Kathleen Mae S. Iniguez, Mikki Mariah C. Tan, Arthur Pius P. Santiago* Manufacturing Engineering and
Implantable Microelectronic Devices
 ECE 8803/4803 Implantable Microelectronic Devices Fall - 2015 Maysam Ghovanloo (mgh@gatech.edu) School of Electrical and Computer Engineering Georgia Institute of Technology 2015 Maysam Ghovanloo 1 Outline
ECE 8803/4803 Implantable Microelectronic Devices Fall - 2015 Maysam Ghovanloo (mgh@gatech.edu) School of Electrical and Computer Engineering Georgia Institute of Technology 2015 Maysam Ghovanloo 1 Outline
The Human Machine: Biomechanics in Daily Life.
 The Human Machine: Biomechanics in Daily Life www.fisiokinesiterapia.biz Biomechanics The study or application of mechanics to biological systems. The study of the forces that act on the body and their
The Human Machine: Biomechanics in Daily Life www.fisiokinesiterapia.biz Biomechanics The study or application of mechanics to biological systems. The study of the forces that act on the body and their
Public Presentation 2014, NOVEMBER
 Focused Ultrasound Therapy Using Robotic Approaches Public Presentation 2014, NOVEMBER Project ID: 611963 Objective: ICT-2013.2.1 Robotics, Cognitive Systems & Smart Spaces, Symbiotic Interaction PROJECT
Focused Ultrasound Therapy Using Robotic Approaches Public Presentation 2014, NOVEMBER Project ID: 611963 Objective: ICT-2013.2.1 Robotics, Cognitive Systems & Smart Spaces, Symbiotic Interaction PROJECT
1. INTRODUCTION. Vision based Multi-feature HGR Algorithms for HCI using ISL Page 1
 1. INTRODUCTION Sign language interpretation is one of the HCI applications where hand gesture plays important role for communication. This chapter discusses sign language interpretation system with present
1. INTRODUCTION Sign language interpretation is one of the HCI applications where hand gesture plays important role for communication. This chapter discusses sign language interpretation system with present
rapael smart rehab solution
 rapael smart rehab solution RAPAEL Smart Rehabilitation concept Intensive Repetitive Task-oriented Learning Schedule Algorithm for rehabilitation Individualized adaptive training RAPAEL Smart Rehabilitation
rapael smart rehab solution RAPAEL Smart Rehabilitation concept Intensive Repetitive Task-oriented Learning Schedule Algorithm for rehabilitation Individualized adaptive training RAPAEL Smart Rehabilitation
Re: ENSC 370 Project Gerbil Functional Specifications
 Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
EMG-Based Control of an Exoskeleton Robot for Human Forearm and Wrist Motion Assist
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 EMG-Based Control of an Exoskeleton Robot for Human Forearm and Wrist Motion Assist Ranathunga Arachchilage
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 EMG-Based Control of an Exoskeleton Robot for Human Forearm and Wrist Motion Assist Ranathunga Arachchilage
Northeastern University. Boston, Massachusetts. August, 2013
 Design and Control of a 2 Degree of Freedom Upper Limb Robotic Rehabilitation Device A Thesis Presented by Patrick Joseph Murphy to The Department of Mechanical and Industrial Engineering in partial fulfillment
Design and Control of a 2 Degree of Freedom Upper Limb Robotic Rehabilitation Device A Thesis Presented by Patrick Joseph Murphy to The Department of Mechanical and Industrial Engineering in partial fulfillment
Estimation of the Upper Limb Lifting Movement Under Varying Weight and Movement Speed
 1 Sungyoon Lee, 1 Jaesung Oh, 1 Youngwon Kim, 1 Minsuk Kwon * Jaehyo Kim 1 Department of mechanical & control engineering, Handong University, qlfhlxhl@nate.com * Department of mechanical & control engineering,
1 Sungyoon Lee, 1 Jaesung Oh, 1 Youngwon Kim, 1 Minsuk Kwon * Jaehyo Kim 1 Department of mechanical & control engineering, Handong University, qlfhlxhl@nate.com * Department of mechanical & control engineering,
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop. Ed Chadwick Keele University Staffordshire, UK.
 Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop Control Applications Ed Chadwick Keele University Staffordshire, UK. Acknowledgements Dimitra Blana, Keele University, Staffordshire, UK.
Fast Simulation of Arm Dynamics for Real-time, Userin-the-loop Control Applications Ed Chadwick Keele University Staffordshire, UK. Acknowledgements Dimitra Blana, Keele University, Staffordshire, UK.
µangelo: A Novel Minimally Invasive Surgical System Based on an Anthropomorphic Design*
 2014 5th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) August 12-15, 2014. São Paulo, Brazil µangelo: A Novel Minimally Invasive Surgical System Based on
2014 5th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) August 12-15, 2014. São Paulo, Brazil µangelo: A Novel Minimally Invasive Surgical System Based on
REHABILITATION IN VIRTUAL REALITY VAST.REHAB IS DESIGNED FOR PHYSICAL, OCCUPATIONAL AND COGNITIVE THERAPY
 VAST.REHAB IS DESIGNED FOR PHYSICAL, OCCUPATIONAL AND COGNITIVE THERAPY We create a fully-featured virtual reality exercise and diagnostic system with the flexibility to work for everyone from small physiotherapy
VAST.REHAB IS DESIGNED FOR PHYSICAL, OCCUPATIONAL AND COGNITIVE THERAPY We create a fully-featured virtual reality exercise and diagnostic system with the flexibility to work for everyone from small physiotherapy
Introduction to Computational Neuroscience
 Introduction to Computational Neuroscience Lecture 10: Brain-Computer Interfaces Ilya Kuzovkin So Far Stimulus So Far So Far Stimulus What are the neuroimaging techniques you know about? Stimulus So Far
Introduction to Computational Neuroscience Lecture 10: Brain-Computer Interfaces Ilya Kuzovkin So Far Stimulus So Far So Far Stimulus What are the neuroimaging techniques you know about? Stimulus So Far
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible