Behavior Architectures
|
|
|
- Conrad Reed
- 6 years ago
- Views:
Transcription
1 Behavior Architectures
2 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible with each other?
3 Robotic Architecture The set of structural components in which perception, reasoning, and action occur. Provides a principled way of organizing a control system. In addition to providing structure, it imposes constraints on the way the control problem can be solved.
4 Biological Foundations Ethology: The study of animal behavior in natural conditions Individual animal behaviors How animals acquire behaviors How animals select or coordinate groups of behaviors Cognitive psychology: The study of how humans think and represent knowledge
5 Behavior Behavior: Mapping of sensory inputs to a pattern of motor actions that are used to achieve a task Three broad categories of behaviors: Reflexive behaviors: Stimulus-response Hard-wired for fast response Example: (physical) knee-jerk reaction Reactive behaviors: Learned Compiled down to be executed without conscious thought Examples: muscle memory playing piano, riding bicycle, running, etc. Conscious behaviors: Require deliberative thought Examples: writing computer code, completing your tax returns, etc.
6 Deliberative vs Reactive

7 Deliberative Systems Sense-Plan-Act Classical control systems, first to be tried In AI, these are planning-based architectures that were used to reason about non-physical domains, such as chess Shakey, 1960s

8 Shakey s world (STRIPS planning)

9 Example of Hierarchical Deliberative System Nested Hierarchical Controller: major contribution was decomposition of planning into three subsystems.
10 Hierarchical Planning
11 Reactive (Behavior Based) Systems Behavior: Mapping of sensory inputs to a pattern of motor actions that are used to achieve a task A reactive robotic system tightly couples perception to action without the use of intervening abstract representations or time history
12 Reactive/ Behavior-Based Robotic Systems Provide a means for a robot to navigate in an uncertain environment and unpredictable world without planning Operate by endowing the robot with behaviors that deal with specific goals independently and coordinating them in a purposeful way
13 Behavior Based Systems sense act sense act sense act Environment
14 Navigation Example Consider going from one room to another. What is involved? Getting to your destination from your current location Not bumping into anything along the way Skillfully negotiating your way around other students who may have the same or different intentions Observing cultural idiosyncrasies (e.g., deferring to someone ofhigher priority age, rank, etc.; or passing on the right (in the U.S.), ) Coping with change and doing whatever else is necessary
15 Assembling Behaviors Issue: When have multiple behaviors, how do we combine them?
16 Coordination Function Two main strategies: Competitive Provide a means of coordinating behavioral response for conflict resolution Can be viewed as winner take all E.g., Pure arbitration, where only one behavior s output is selected Cooperative Provides ability to concurrently use the output of more than one behavior at a time Blend outputs of multiple behaviors E.g., vector addition (can also have combination of these two)
17 Basis for Robotic Behavior Key questions: What are the right behavioral building blocks for robotic systems? What really is a primitive behavior? How are these behaviors effectively coordinated? How are these behaviors grounded to sensors and actuators? No universally agreed-upon answers Ultimate evaluation: appropriateness of the robotic response to a given task and environment
18 Behavior-Based/Reactive systems Purely reactive robot can t: Plan optimal trajectories Make maps Monitor its own performance Select best behaviors to accomplish a task Also: Design of behaviors is more of an art than a science But, consensus is that behavior-based/robotic control is best for low-level control because of: Pragmatic success Elegance as a computational theory for both biological and machine intelligence
19 Deliberative Systems Sometimes Preferred when: World can be accurately modeled Uncertainty is restricted Some guarantee exists of virtually no change in the world during execution But, real world of biological agents isn t usually described in this way
20 Hybrid Deliberative/Reactive Architectures Best general architecture solution because: Use of asynchronous processing techniques (multi-tasking, threads, etc) allow deliberative functions to execute independently of reactive behaviors Provides responsiveness, robustness, and flexibility of purely reactive systems Good software modularity allows subsystems or objects in Hybrid architectures to be mixed and matched for specific applications
21 Example: 3T architecture
22

23 EGO Architecture
24 Cognitive architecture inspired by ToM and simulation theory Evaluated on two tasks: Assisting human to attain desired object Learning from ambiguous demonstrations Human-human and human-robot studies
25 Theory of Mind (ToM) The ability to attribute mental states beliefs, intents, desires, pretending, knowledge, etc. to oneself and others understand that others have beliefs, desires and intentions that are different from one's own. Premack and Woodruff, 1978.
26 Theory of Mind (ToM) Enables one to understand that mental states can be the cause of and thus be used to explain and predict others behavior. Appears to be an innate potential ability in humans, but one requiring social and other experience over many years to bring to fruition. If a person does not have a complete theory of mind it may be a sign of cognitive or developmental impairment.
27 False-Belief Task Recognize that others can have beliefs about the world that are different from your own. Understand how knowledge is formed, that people s beliefs are based on their knowledge, that mental states can differ from reality, and that people s behavior can be predicted by their mental states Children typically have this ability at age 4
 candy\" each is shown that the box in fact contained pencils.")
28 Appearance Reality Task Experimenter asks children what they believe to be the contents of a box that looks as though it holds candy. After the child guesses (usually) candy" each is shown that the box in fact contained pencils. The experimenter then re-closes the box and asks the child what she thinks another person, who has not been shown the true contents of the box, will think is inside. Children typically pass this test at age 4 or 5
29 Simulation Theory Certain parts of the brain have dual use to both generate our own behavior and mental states, and to infer the same in others. Mirror neurons
30


31 Perception m = match, c= confidence, d=optional derived feature value
32 Beliefs
33

34 Belief update cycle
35 Beliefs and Perspective Transformation
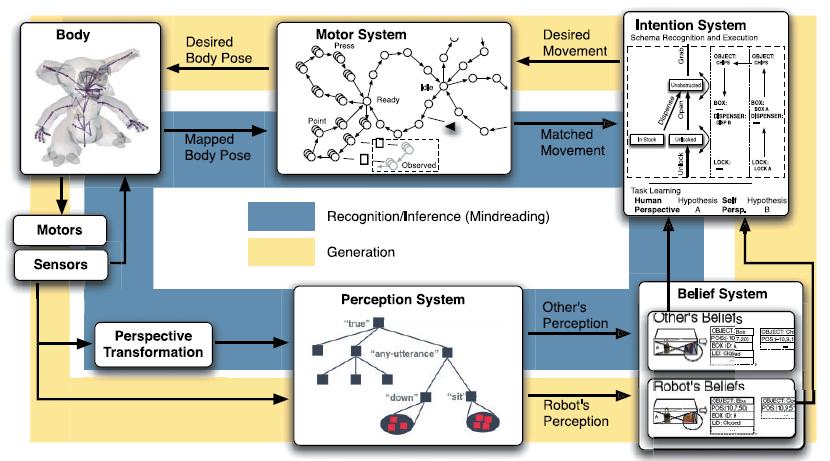
36 Motor System Offline: train body mapping (video) Real time: Recognize body positions (keyframes) Track over time Match to known robot actions to recognize human action
37 Intention System Goal directed actions Determine a person s goals, plans or desires through simulation
38 Obtaining cookies: - Dispenser - Unlocking box Solid line (generation): evaluating preconditions required to complete goal condition Dashed line (sim): populate later schemas with current parameters to predict possible goals/intentions
39 video
40
41 Discussion
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Fundamentals of Autonomous Systems Control architectures in robotics Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 9th March 2016 Introduction Robotic paradigms
Fundamentals of Autonomous Systems Control architectures in robotics Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 9th March 2016 Introduction Robotic paradigms
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Robot Behavior Genghis, MIT Callisto, GATech
 Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Part I Part 1 Robotic Paradigms and Control Architectures
 Overview of the Lecture Robotic Paradigms and Control Architectures Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 02 B4M36UIR Artificial
Overview of the Lecture Robotic Paradigms and Control Architectures Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 02 B4M36UIR Artificial
Agent-Based Systems. Agent-Based Systems. Michael Rovatsos. Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19
 Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
Robot Learning Letter of Intent
 Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES
 Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
ICS 606. Intelligent Autonomous Agents 1. Intelligent Autonomous Agents ICS 606 / EE 606 Fall Reactive Architectures
 Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Lecture 5- Hybrid Agents 2015/2016
 Lecture 5- Hybrid Agents 2015/2016 Ana Paiva * These slides are based on the book by Prof. M. Woodridge An Introduction to Multiagent Systems and the slides online compiled by Professor Jeffrey S. Rosenschein..
Lecture 5- Hybrid Agents 2015/2016 Ana Paiva * These slides are based on the book by Prof. M. Woodridge An Introduction to Multiagent Systems and the slides online compiled by Professor Jeffrey S. Rosenschein..
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
DYNAMICISM & ROBOTICS
 DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
EICA: Combining Interactivity with Autonomy for Social Robots
 EICA: Combining Interactivity with Autonomy for Social Robots Yasser F. O. Mohammad 1, Toyoaki Nishida 2 Nishida-Sumi Laboratory, Department of Intelligence Science and Technology, Graduate School of Informatics,
EICA: Combining Interactivity with Autonomy for Social Robots Yasser F. O. Mohammad 1, Toyoaki Nishida 2 Nishida-Sumi Laboratory, Department of Intelligence Science and Technology, Graduate School of Informatics,
Pavlovian, Skinner and other behaviourists contribution to AI
 Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Biological Foundations of Reactive and Behavior-Based Control
 Biological Foundations of Reactive and Behavior-Based Control January 30, 2007 Class Meeting 5 Objectives To develop an understanding of the possible relationships between animal behavior and robot control
Biological Foundations of Reactive and Behavior-Based Control January 30, 2007 Class Meeting 5 Objectives To develop an understanding of the possible relationships between animal behavior and robot control
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments. Stephen G. Ware CSCI 4525 / 5525
 Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
38. Behavior-Based Systems
 Maja J. Matarić, François Michaud 38. Behavior-Based Systems 891 Nature is filled with examples of autonomous creatures capable of dealing with the diversity, unpredictability, and rapidly changing conditions
Maja J. Matarić, François Michaud 38. Behavior-Based Systems 891 Nature is filled with examples of autonomous creatures capable of dealing with the diversity, unpredictability, and rapidly changing conditions
Animal Behavior. Relevant Biological Disciplines. Inspirations => Models
 Animal Behavior Relevant Biological Disciplines Neuroscience: the study of the nervous system s anatomy, physiology, biochemistry and molecular biology Psychology: the study of mind and behavior Ethology:
Animal Behavior Relevant Biological Disciplines Neuroscience: the study of the nervous system s anatomy, physiology, biochemistry and molecular biology Psychology: the study of mind and behavior Ethology:
Designing Human-like Video Game Synthetic Characters through Machine Consciousness
 Designing Human-like Video Game Synthetic Characters through Machine Consciousness Raúl Arrabales, Agapito Ledezma and Araceli Sanchis Computer Science Department Carlos III University of Madrid http://conscious-robots.com/raul
Designing Human-like Video Game Synthetic Characters through Machine Consciousness Raúl Arrabales, Agapito Ledezma and Araceli Sanchis Computer Science Department Carlos III University of Madrid http://conscious-robots.com/raul
An Overview on Soft Computing in Behavior Based Robotics
 An Overview on Soft Computing in Behavior Based Robotics Frank Hoffmann Fakultät Elektrotechnik und Informationstechnik Universität Dortmund D-44221 Dortmund (Germany) E-mail: hoffmann@esr.e-technik.uni-dortmund.de
An Overview on Soft Computing in Behavior Based Robotics Frank Hoffmann Fakultät Elektrotechnik und Informationstechnik Universität Dortmund D-44221 Dortmund (Germany) E-mail: hoffmann@esr.e-technik.uni-dortmund.de
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS
 1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
AI Programming CS F-04 Agent Oriented Programming
 AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3
 Matt Loper / Brown University Presented for CS296-3") On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3 February 14th, 2007 Introduction What is a good control architecture for a robot? How should it coordinate long
On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3 February 14th, 2007 Introduction What is a good control architecture for a robot? How should it coordinate long
Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
Putting Minsky and Brooks Together. Bob Hearn MIT AI Lab
 Putting Minsky and Brooks Together Bob Hearn MIT AI Lab Perception: Irreconcilable Approaches? Minsky Brooks GOFAI vs. Nouvelle AI search vs. behaviors cognition vs. perception / action abstract symbols
Putting Minsky and Brooks Together Bob Hearn MIT AI Lab Perception: Irreconcilable Approaches? Minsky Brooks GOFAI vs. Nouvelle AI search vs. behaviors cognition vs. perception / action abstract symbols
Deliberating on Ontologies: The Present Situation. Simon Milton Department of Information Systems, The University of Melbourne
 Deliberating on Ontologies: The Present Situation Simon Milton Department of, The University of Melbourne 1. Helping data models better map the world 2. Finding the role of ontology where theories of agency
Deliberating on Ontologies: The Present Situation Simon Milton Department of, The University of Melbourne 1. Helping data models better map the world 2. Finding the role of ontology where theories of agency
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Rethinking Cognitive Architecture!
 Rethinking Cognitive Architecture! Reconciling Uniformity and Diversity via Graphical Models! Paul Rosenbloom!!! 1/25/2010! Department of Computer Science &! Institute for Creative Technologies! The projects
Rethinking Cognitive Architecture! Reconciling Uniformity and Diversity via Graphical Models! Paul Rosenbloom!!! 1/25/2010! Department of Computer Science &! Institute for Creative Technologies! The projects
What is AI? The science of making machines that:
 What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Lecture 6. Perceptual and Motor Schemas
 CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
Embodiment in GLAIR: A Grounded Layered Architecture. with Integrated Reasoning for Autonomous Agents. Henry Hexmoor. Johan Lammens.
 Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
AIR FORCE INSTITUTE OF TECHNOLOGY
 Dynamic Behavior Sequencing in a Hybrid Robot Architecture THESIS Jeffrey P. Duffy, Captain, USAF AFIT/GCE/ENG/08-03 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
Dynamic Behavior Sequencing in a Hybrid Robot Architecture THESIS Jeffrey P. Duffy, Captain, USAF AFIT/GCE/ENG/08-03 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
The Concept of Simulation in Control-Theoretic Accounts of Motor Control and Action Perception
 The Concept of Simulation in Control-Theoretic Accounts of Motor Control and Action Perception Mitchell Herschbach (mherschb@ucsd.edu) Department of Philosophy, University of California, San Diego, 9500
The Concept of Simulation in Control-Theoretic Accounts of Motor Control and Action Perception Mitchell Herschbach (mherschb@ucsd.edu) Department of Philosophy, University of California, San Diego, 9500
AS robots interactions with humans become increasingly
 1 Biasing Behavioral Activation with Intent Patrick Ulam and Ronald Arkin College of Computing Georgia Institute of Technology Atlanta, USA 30332 Email: pulam, arkin@cc.gatech.edu Abstract Deliberate control
1 Biasing Behavioral Activation with Intent Patrick Ulam and Ronald Arkin College of Computing Georgia Institute of Technology Atlanta, USA 30332 Email: pulam, arkin@cc.gatech.edu Abstract Deliberate control
Learning Utility for Behavior Acquisition and Intention Inference of Other Agent
 Learning Utility for Behavior Acquisition and Intention Inference of Other Agent Yasutake Takahashi, Teruyasu Kawamata, and Minoru Asada* Dept. of Adaptive Machine Systems, Graduate School of Engineering,
Learning Utility for Behavior Acquisition and Intention Inference of Other Agent Yasutake Takahashi, Teruyasu Kawamata, and Minoru Asada* Dept. of Adaptive Machine Systems, Graduate School of Engineering,
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement
 ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
Cognitive Development: Theory of mind
 Cognitive Development: Theory of mind Informatics 1 CG: Lecture 17 Chris Lucas clucas2@inf.ed.ac.uk Theory of mind Our intuitive beliefs about mental states: Concrete beliefs: The house is white *on this
Cognitive Development: Theory of mind Informatics 1 CG: Lecture 17 Chris Lucas clucas2@inf.ed.ac.uk Theory of mind Our intuitive beliefs about mental states: Concrete beliefs: The house is white *on this
Agents. Environments Multi-agent systems. January 18th, Agents
 Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Perception Lie Paradox: Mathematically Proved Uncertainty about Humans Perception Similarity
 Perception Lie Paradox: Mathematically Proved Uncertainty about Humans Perception Similarity Ahmed M. Mahran Computer and Systems Engineering Department, Faculty of Engineering, Alexandria University,
Perception Lie Paradox: Mathematically Proved Uncertainty about Humans Perception Similarity Ahmed M. Mahran Computer and Systems Engineering Department, Faculty of Engineering, Alexandria University,
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Agents and Environments
 Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Grounded Cognition. Lawrence W. Barsalou
 Grounded Cognition Lawrence W. Barsalou Department of Psychology Emory University July 2008 Grounded Cognition 1 Definition of grounded cognition the core representations in cognition are not: amodal symbols
Grounded Cognition Lawrence W. Barsalou Department of Psychology Emory University July 2008 Grounded Cognition 1 Definition of grounded cognition the core representations in cognition are not: amodal symbols
Neuro-Inspired Statistical. Rensselaer Polytechnic Institute National Science Foundation
 Neuro-Inspired Statistical Pi Prior Model lfor Robust Visual Inference Qiang Ji Rensselaer Polytechnic Institute National Science Foundation 1 Status of Computer Vision CV has been an active area for over
Neuro-Inspired Statistical Pi Prior Model lfor Robust Visual Inference Qiang Ji Rensselaer Polytechnic Institute National Science Foundation 1 Status of Computer Vision CV has been an active area for over
COMP150 Behavior-Based Robotics
 For class use only, do not distribute COMP150 Behavior-Based Robotics http://www.cs.tufts.edu/comp/150bbr/timetable.html http://www.cs.tufts.edu/comp/150bbr/syllabus.html Project directions and topics
For class use only, do not distribute COMP150 Behavior-Based Robotics http://www.cs.tufts.edu/comp/150bbr/timetable.html http://www.cs.tufts.edu/comp/150bbr/syllabus.html Project directions and topics
Topological Considerations of Memory Structure
 Procedia Computer Science Volume 41, 2014, Pages 45 50 This space is reserved for the Procedia header, do not use it BICA 2014. 5th Annual International Conference on Biologically Inspired Cognitive Architectures
Procedia Computer Science Volume 41, 2014, Pages 45 50 This space is reserved for the Procedia header, do not use it BICA 2014. 5th Annual International Conference on Biologically Inspired Cognitive Architectures
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Semiotics and Intelligent Control
 Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Investigating Models of Social Development Using a Humanoid Robot
 Investigating Models of Social Development Using a Humanoid Robot (Invited Paper) Brian Scassellati Yale University Department of Computer Science 51 Prospect Street New Haven, CT 06520 Email: scaz@cs.yale.edu
Investigating Models of Social Development Using a Humanoid Robot (Invited Paper) Brian Scassellati Yale University Department of Computer Science 51 Prospect Street New Haven, CT 06520 Email: scaz@cs.yale.edu
COACH WORKPLACE REPORT. Jane Doe. Sample Report July 18, Copyright 2011 Multi-Health Systems Inc. All rights reserved.
 COACH WORKPLACE REPORT Jane Doe Sample Report July 8, 0 Copyright 0 Multi-Health Systems Inc. All rights reserved. Response Style Explained Indicates the need for further examination possible validity
COACH WORKPLACE REPORT Jane Doe Sample Report July 8, 0 Copyright 0 Multi-Health Systems Inc. All rights reserved. Response Style Explained Indicates the need for further examination possible validity
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
MOBILE & SERVICE ROBOTICS RO OBOTIC CA 01. Supervision and control
 CY 02CFIC CFIDV MOBILE & SERVICE ROBOTICS Supervision and control Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 Supervision and Control 02CFIC CY a priori knowledge
CY 02CFIC CFIDV MOBILE & SERVICE ROBOTICS Supervision and control Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 Supervision and Control 02CFIC CY a priori knowledge
Garbay Catherine CNRS, LIG, Grenoble
 Garbay Catherine CNRS, LIG, Grenoble Sensors capturing world-wide information in the physical, cyber or social realms Open data initiatives, Web 4.0, crowdsourcing Multi-sensory immersion: skinput, novel
Garbay Catherine CNRS, LIG, Grenoble Sensors capturing world-wide information in the physical, cyber or social realms Open data initiatives, Web 4.0, crowdsourcing Multi-sensory immersion: skinput, novel
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Inferencing in Artificial Intelligence and Computational Linguistics
 Inferencing in Artificial Intelligence and Computational Linguistics (http://www.dfki.de/~horacek/infer-ai-cl.html) no classes on 28.5., 18.6., 25.6. 2-3 extra lectures will be scheduled Helmut Horacek
Inferencing in Artificial Intelligence and Computational Linguistics (http://www.dfki.de/~horacek/infer-ai-cl.html) no classes on 28.5., 18.6., 25.6. 2-3 extra lectures will be scheduled Helmut Horacek
Behavior-based Robotics And The Reactive Paradigm A Survey
 Proceedings of International Workshop on Data Mining and Artificial Intelligence (DMAI 08) 24 December, 2008, Khulna, Bangladesh Behavior-based Robotics And The Reactive Paradigm A Survey L. De Silva 1
Proceedings of International Workshop on Data Mining and Artificial Intelligence (DMAI 08) 24 December, 2008, Khulna, Bangladesh Behavior-based Robotics And The Reactive Paradigm A Survey L. De Silva 1
 http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
Affective Action Selection and Behavior Arbitration for Autonomous Robots
 Affective Action Selection and Behavior Arbitration for Autonomous Robots Matthias Scheutz Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, USA mscheutz@cse.nd.edu
Affective Action Selection and Behavior Arbitration for Autonomous Robots Matthias Scheutz Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, USA mscheutz@cse.nd.edu
Artificial Psychology Revisited: Constructs for Modeling Artificial Emotions
 Int'l Conf. Artificial Intelligence ICAI'15 421 Artificial Psychology Revisited: Constructs for Modeling Artificial Emotions James A. Crowder, John N. Carbone, Shelli Friess Raytheon Intelligence, Information,
Int'l Conf. Artificial Intelligence ICAI'15 421 Artificial Psychology Revisited: Constructs for Modeling Artificial Emotions James A. Crowder, John N. Carbone, Shelli Friess Raytheon Intelligence, Information,
Autonomous Mobile Robotics
 1 2 3 A reflex arc is a neural pathway that controls a reflex. In vertebrates, most sensory neurons do not pass directly into the brain, but synapse in the spinal cord. This allows for faster reflex actions
1 2 3 A reflex arc is a neural pathway that controls a reflex. In vertebrates, most sensory neurons do not pass directly into the brain, but synapse in the spinal cord. This allows for faster reflex actions
Bundles of Synergy A Dynamical View of Mental Function
 Bundles of Synergy A Dynamical View of Mental Function Ali A. Minai University of Cincinnati University of Cincinnati Laxmi Iyer Mithun Perdoor Vaidehi Venkatesan Collaborators Hofstra University Simona
Bundles of Synergy A Dynamical View of Mental Function Ali A. Minai University of Cincinnati University of Cincinnati Laxmi Iyer Mithun Perdoor Vaidehi Venkatesan Collaborators Hofstra University Simona
Three Minute Review. critiques of Piaget s theories information processing perspective
 Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
Three Minute Review. 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence
 physics, senses, movement, object permanence") Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
Three Minute Review. Test Yourself. Recommended Homework
 Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
Three Minute Review COGNITIVE DEVELOPMENT Piaget s Stages 1. Sensorimotor Stage (0-2) physics, senses, movement, object permanence 2. Preoperational Stage (2-7) symbolic, egocentric, no conservation 3.
M.Sc. in Cognitive Systems. Model Curriculum
 M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
Agents. This course is about designing intelligent agents Agents and environments. Rationality. The vacuum-cleaner world
 This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
EEL-5840 Elements of {Artificial} Machine Intelligence
 Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
KECERDASAN BUATAN 3. By Sirait. Hasanuddin Sirait, MT
 KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
arxiv: v1 [cs.ai] 5 Oct 2018 October 8, 2018
![arxiv: v1 [cs.ai] 5 Oct 2018 October 8, 2018](/thumbs/87/97342403.jpg "arxiv: v1 [cs.ai] 5 Oct 2018 October 8, 2018") André Ofner Research Focus Cognitive Sciences University of Potsdam Potsdam, Germany ofner@uni-potsdam.de Sebastian Stober Artificial Intelligence Lab Otto von Guericke University Magdeburg, Germany stober@ovgu.de
André Ofner Research Focus Cognitive Sciences University of Potsdam Potsdam, Germany ofner@uni-potsdam.de Sebastian Stober Artificial Intelligence Lab Otto von Guericke University Magdeburg, Germany stober@ovgu.de
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Unifying Data-Directed and Goal-Directed Control: An Example and Experiments
 Unifying Data-Directed and Goal-Directed Control: An Example and Experiments Daniel D. Corkill, Victor R. Lesser, and Eva Hudlická Department of Computer and Information Science University of Massachusetts
Unifying Data-Directed and Goal-Directed Control: An Example and Experiments Daniel D. Corkill, Victor R. Lesser, and Eva Hudlická Department of Computer and Information Science University of Massachusetts
Expert System Profile
 Expert System Profile GENERAL Domain: Medical Main General Function: Diagnosis System Name: INTERNIST-I/ CADUCEUS (or INTERNIST-II) Dates: 1970 s 1980 s Researchers: Ph.D. Harry Pople, M.D. Jack D. Myers
Expert System Profile GENERAL Domain: Medical Main General Function: Diagnosis System Name: INTERNIST-I/ CADUCEUS (or INTERNIST-II) Dates: 1970 s 1980 s Researchers: Ph.D. Harry Pople, M.D. Jack D. Myers
The Fox and the Crow
 The Fox and the Crow Roman Karl Seminar in Artificial Intelligence, November 2012 The fox and the crow is an old Greek fable. There are two characters, where both have a different behavior, which is caused
The Fox and the Crow Roman Karl Seminar in Artificial Intelligence, November 2012 The fox and the crow is an old Greek fable. There are two characters, where both have a different behavior, which is caused
Unifying Cognitive Functions and Emotional Appraisal. Bob Marinier John Laird University of Michigan 26 th Soar Workshop: May 24, 2006
 Unifying Cognitive Functions and Emotional Appraisal Bob Marinier John Laird University of Michigan 26 th Soar Workshop: May 24, 2006 Introduction Have independent theories of emotion and cognitive functions
Unifying Cognitive Functions and Emotional Appraisal Bob Marinier John Laird University of Michigan 26 th Soar Workshop: May 24, 2006 Introduction Have independent theories of emotion and cognitive functions
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
WP 7: Emotion in Cognition and Action
 WP 7: Emotion in Cognition and Action Lola Cañamero, UH 2 nd Plenary, May 24-27 2005, Newcastle WP7: The context Emotion in cognition & action in multi-modal interfaces? Emotion-oriented systems adapted
WP 7: Emotion in Cognition and Action Lola Cañamero, UH 2 nd Plenary, May 24-27 2005, Newcastle WP7: The context Emotion in cognition & action in multi-modal interfaces? Emotion-oriented systems adapted
Artificial Intelligence: Its Scope and Limits, by James Fetzer, Kluver Academic Publishers, Dordrecht, Boston, London. Artificial Intelligence (AI)
") Artificial Intelligence: Its Scope and Limits, by James Fetzer, Kluver Academic Publishers, Dordrecht, Boston, London. Artificial Intelligence (AI) is the study of how to make machines behave intelligently,
Artificial Intelligence: Its Scope and Limits, by James Fetzer, Kluver Academic Publishers, Dordrecht, Boston, London. Artificial Intelligence (AI) is the study of how to make machines behave intelligently,
AI: Intelligent Agents. Chapter 2
 AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
ERA: Architectures for Inference
 ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
Introduction and Historical Background. August 22, 2007
 1 Cognitive Bases of Behavior Introduction and Historical Background August 22, 2007 2 Cognitive Psychology Concerned with full range of psychological processes from sensation to knowledge representation
1 Cognitive Bases of Behavior Introduction and Historical Background August 22, 2007 2 Cognitive Psychology Concerned with full range of psychological processes from sensation to knowledge representation
Learning and Adaptive Behavior, Part II
 Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Multi-agent Engineering. Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture. Ivan Tanev.
 Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention
 Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of