Delving into Salient Object Subitizing and Detection
|
|
|
- Julie Tyler
- 5 years ago
- Views:
Transcription








![These two human inborn abilities can influence each other in an either serial or parallel form within the human visual system [26, 25], and evidences show that](/docs-images/87/96032171/images/1-8.jpg "numerical and spatial representations are intrinsically interconnected in our brain [11].")

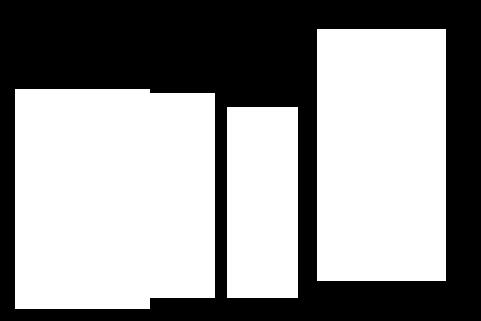
 Input (b) w/o subitizing (c) w/ subitizing (d) GT Figure 1: Our method augments salient object detection with subitizing.")

1 Delving into Salient Object Subitizing and Detection Shengfeng He 1 Jianbo Jiao 2 Xiaodan Zhang 2,3 Guoqiang Han 1 Rynson W.H. Lau 2 1 South China University of Technology, China 2 City University of Hong Kong, Hong Kong 3 University of Chinese Academy of Sciences, China Abstract Subitizing (i.e., instant judgement on the number) and detection of salient objects are human inborn abilities. These two tasks influence each other in the human visual system. In this paper, we delve into the complementarity of these two tasks. We propose a multi-task deep neural network with weight prediction for salient object detection, where the parameters of an adaptive weight layer are dynamically determined by an auxiliary subitizing network. The numerical representation of salient objects is therefore embedded into the spatial representation. The proposed joint network can be trained end-to-end using backpropagation. Experiments show the proposed multi-task network outperforms existing multi-task architectures, and the auxiliary subitizing network provides strong guidance to salient object detection by reducing false positives and producing coherent saliency maps. Moreover, the proposed method is an unconstrained method able to handle images with/without salient objects. Finally, we show state-of-theart performance on different salient object datasets. 1. Introduction The human visual system has an excellent ability in rapidly locating visually distinct objects in a scene, known as visual attention. On the other hand, a human can accurately enumerate up to four objects at a glance without counting. This rapid enumeration of a small number of items is referred to as subitizing [13]. These two human inborn abilities can influence each other in an either serial or parallel form within the human visual system [26, 25], and evidences show that numerical and spatial representations are intrinsically interconnected in our brain [11]. These abilities are frequently involved in our daily life for prompt decision making in basic tasks like searching, navigation, and choice making. However, these biologically-correlated abilities have not been jointly explored in computer vision. Traditional methods focus solely on detecting salient objects. While achieving good results, they suffer from two main problems. First, (a) Input (b) w/o subitizing (c) w/ subitizing (d) GT Figure 1: Our method augments salient object detection with subitizing. Subitizing provides strong guidance to accurately detect salient objects from complex background. most methods assume the presence of salient objects, and fail if this is not the case. Second, background distraction is usually the main source of detection errors, leading to excessive detected regions or incorrect connections between objects (see Fig. 1b). These two problems are in fact relevant to the subitizing task. Subitizing knowledge can help predict the existence of dominant objects. Meanwhile, it can also constrain the number of object-like regions to be detected in the saliency map. Although Zhang et al. [36, 38] propose to predict the number of salient objects, they only use it to filter images without salient objects. No interactions are considered between the number and the detection of salient objects. In this paper, we aim to explore the interaction between numerical and spatial representations in the salient object detection task. To this end, we propose a multi-task deep convolution neural network (CNN) with an adaptive weight layer. While this CNN is trained for salient object detection, the weights of its adaptive weight layer are dynamically determined by an auxiliary subitizing network, allowing the layer to encode subitizing knowledge. In this way, a single deep CNN architecture has a dynamical representation space, and it is able to deal with various input contextual information by dynamically predicting weight in the adaptive weight layer. The proposed network is supervised by two different tasks jointly, and it can be trained end-to-end 11059
2 using back-propagation. The main contributions of this work are as follows: We explore different multi-task networks adapted for integrating multiple sources of knowledge. In particular, we explore how different levels of shared information affect saliency detection performance. We design a deep network to detect salient objects with the guidance of subitizing, by introducing an adaptive weight layer. This layer integrates two different tasks by adaptively assigning weights according to the predicted number of salient objects. We achieve state-of-the-art performance on all four datasets. Specifically, the proposed method outperforms existing methods on an unconstrained salient object dataset. To the best of our knowledge, our work is the first to explore the interaction between numerical and spatial representations in a deep model. 2. Related Work Salient object detection methods can be roughly classified into two categories, hand-crafted and learning based models. As the proposed method belongs to the learning based category, we focus our discussion on relevant deep learning works. A comprehensive literature review can be found in [2]. In recent years, CNNs have been shown to be very effective on various visual recognition tasks, such as image classification [14], semantic segmentation [8] and object detection [9]). We are beginning to see some salient object detection works in these two years. In [10], He et al. apply the region-based model to learn the superpixel-wise feature representation, which reduces the computational cost significantly and considers global context information. However, representing a superpixel with the mean color is not informative enough. It is also difficult to fully recover the spatial structure of the image with superpixels. On the other hand, some methods propose to incorporate both local and global contextual information using CNNs to detect saliency. Wang et al. [30] first apply a CNN to extract local patch features to obtain intermediate saliency results, and another CNN to globally integrate the initial saliency map with object proposals. Zhao et al. [39] train a twostream network, one for the local context of the centered region and the other for the global context. A simple fully connected layer is used to combine the two streams. Li et al. [17] use a pre-trained CNN as a feature extractor. They concatenate the features obtained from patches of three different scales and feed them to two fully connected layers. These methods, however, apply CNN in a sliding window fashion, resulting in a high computational cost. To address the high computational cost, the fully convolutional network (FCN) [21] and deconvolution network [23] are used to generate a saliency map in an endto-end framework. As they obtain the final result through upsampling from a very coarse prediction, they cannot guarantee accurate segmentation of the saliency map. Different approaches have been proposed to address this problem. Li et al. [18] combine the FCN with a segment-wise network using fully connected CRF to obtain a spatial coherent saliency map. Some latest methods [15, 31] aim to refine the resulting saliency map using recurrent networks. Kuen et al. [15] use recurrent attentional networks to selectively refine the object boundaries, while Wang et al. [31] incorporate recurrent refinement and background priors. However, the added recurrent network may increase the training and testing times. In this paper, we delve into this problem with subitizing guidance and propose three refinement approaches without the recurrent mechanism. Weight prediction in CNN has been explored in [16] and [24] for zero-shot learning and visual question answering, respectively. Lei et al. [16] predict a binary classifier for unseen categories based on the given textual description. Noh et al. [24] propose to predict the weights of a fullyconnected layer based on the given question in question answering. However, these methods try to predict the weights of the fully-connected layer, which leads to the weight explosion problem. Although a hash trick is applied in [24] to alleviate this problem, performance loss is inevitable. In contrast, we introduce weight prediction in a fully convolutional framework, where the weights can be directly predicted by another network without significantly increasing the number of parameters. We also show that the adaptive weight layer can be trained in a multi-task network. Finally, our work explores the augmentation of one task by another, which leads to better embedding performance. 3. Multi-task Sharing Networks Given an image, we aim to detect salient objects with the aid of subitizing. An intuitive solution is to jointly train two tasks in a multi-task framework. Here, we explore three multi-task architectures for salient object detection, as shown in Fig. 2. Cascaded Network: This type of network constructs the layers of two tasks sequentially. The layers of the first task are shared with the second task, while the second task performs prediction with additional layers. This network involves multiple losses. The loss from the second task guides the entire network, while the loss from the first task only supervises the first half of the layers. The cascaded network passes the knowledge in a sequential fashion. However, due to its cascaded architecture, the gradient from the second task may be attenuated in the first half of the layers. In addition, the resolution of the second half of the layers may 1060
3 (a) Cascaded Network (b) Concatenated Network (c) Shared Network Figure 2: Multi-task sharing architectures. (a) The cascaded network combines the two tasks in a serial form, where the output features of task 1 are the input of task 2. (b) The concatenated network simply concatenates the output features of two sub-networks for the two tasks. (c) The shared network involves multiple losses during training, and different sharing levels can be achieved by adjusting the number of shared layers. become too small to retain spatial information, limiting the network to specific tasks. Concatenated Network: The most straightforward way to integrate multiple sources of knowledge is to concatenate the learned features. The sub-network for each task is typically pre-trained on its own dataset. Once properly trained, these two tasks produce feature maps individually, and concatenated together to form a hyper feature. This hyper feature is then fed to a decision network for the final prediction. The main drawback of this type of network is that both subnetworks are trained individually, and the network can only supervised by one of the tasks. The joint training principle cannot be applied in this type of network. Shared Network: This architecture might be the most commonly used multi-task architecture, due to its easy-toadjust characteristics and can be trained jointly with multiple losses. Two tasks are constructed in a parallel form with several shared convolution layers. The number of shared layers may range from one layer (i.e., only the last layer is shared) to all layers (i.e., no parallel layers), depending on applications. This network can be supervised by different forms of losses, to achieve optimal results for both tasks. Sharing of multi-task knowledge is a common property across these three architectures. However, how much knowledge should be shared remain a question. Using the shared network as an example, there are no principle ways to tell how many shared layers should be set to obtain an optimal multi-task training. To investigate this question, we perform an empirical study using the shared network, by exhaustively tuning the number of shared layers, to find out how shared knowledge affects salient object subitizing and detection performances. We start from sharing no knowledge between two tasks (i.e., two independent networks), which is set as the baseline for the other shared networks. We have a total of five convolution layers, and thus there are five shared network variants. For the subitizing task, the last convolution layer connects with a fully connected layer and then outputs the number of salient objects. For the salient object detection task, the shared network is followed by an Task Conv5 Conv4-5 Conv3-5 Conv2-5 Conv1-5 Detection (MAE) Subitizing (map) Table 1: Empirical results on the MSO dataset [36], with different numbers of shared layers in the shared network. The values indicate the performance differences between the shared networks and the two independent baselines (i.e., with no shared knowledge). ConvX-Y means that the two tasks share parameters between the X-th and the Y-th convolution layers. As these results do not show a consistent behavior, knowledge sharing may not be the best policy for multi-task learning. upsampling network similar to FCN [21]. Table 1 shows the empirical results on the MSO dataset [36]. The values indicate the performance differences between the shared networks and the two independent baselines. While sharing the 3rd to 5th convolution layers produces the best performance for salient object detection, sharing the 4th to 5th convolution layers produces the best performance for subitizing. These results reveal a key issue the performance gain by sharing knowledge is unpredictable, and the influence of different sharing levels depends on the task. A similar observation is also found in the cascaded and concatenated networks. Since enumerating all the possibilities is cumbersome in practice, instead of knowledge sharing, we propose to address the multi-task problem by enriching the representation space of the salient object detection task with dynamic weight assignment. 4. Proposed Network Architecture This section presents the proposed network architecture and the overall method for salient object detection Overview The proposed network is a multi-task deep neural network, containing three main components: the salient object detection network, subitizing network, and an adap- 1061




4 Figure 3: The architecture of the proposed method. The upper part is the salient object detection network, and the bottom part is the subitizing network. An adaptive weight layer is added in the middle of the salient object detection network, where its weights are dynamically determined by the subitizing network, to encode numerical representation into spatial representation. Two refinement approaches are also illustrated: feature-based deconvolution with skipped layers and hierarchical supervision. tive weight layer. Fig. 3 shows the architecture of the proposed network. The salient object detection network is constructed based on the convolution-deconvolution pipeline. The convolution stage serves as a feature extractor that transforms the input image into a rich feature representation, while the deconvolution stage serves as a shape generator to segment salient objects based on the extracted features. An adaptive weight layer is added between these two stages. It is a convolution layer whose weights are dynamically determined by the auxiliary subitizing network. The subitizing network is trained to predict the number of salient objects and the weights for the adaptive weight layer. The final output is a probability map that indicates how likely each pixel belongs to the salient objects. We discuss these components in more detail in the following subsections Deep Neural Network with Weight Prediction Given an input image I, the salient object detection network produces a saliency map m from a set of weights θ. The salient object detection is posed as a regression problem, and the saliency value of each pixel(x,y) inmcan be described as: m x,y = p(s R(I,x,y);θ), (1) where R(I,x,y) corresponds to the receptive field of location(x,y) inm. Once the network is trained,θ is fixed and used to detect salient objects for any input images. However, this set of weights cannot be generalized to all types of input images. This is similar to the denosing problem, where a general denoiser may not perform as well as one that is trained specifically on the noise level of the input images [3]. An intuitive solution to address this generalization problem is to train a task-specific network. However, this requires training numerous networks for different tasks. In addition, this prior information (e.g., noise level) is usually unknown in practice. In contrast, we solve this problem through adaptive weight prediction: m x,y = p(s R(I,x,y);θ,θ a (n)), (2) where θ a (n) is the adaptive weights determined according to the predicted number of salient objects, n, of the input image. In this way, detecting salient objects is not only dependent on the static weights θ, but also the adaptive weights θ a (n). In addition, the static weights θ are also trained to interact with the prior information provided by the adaptive weightsθ a (n). These adaptive weights can be considered as numerical representation of the salient objects Predicting Weights with Subitizing To encode the number of salient objects into the adaptive weights, we implement the numerical feature embedding in a convolution layer. We denote the input feature map of this 1062
5 convolution layer asf s. Its corresponding output is then: f o = W a (n)f s +b, (3) where b is the bias, and W a (n) is the adaptive weight matrix. In this way, the introduced adaptive weight matrix parameterizes this convolution layer as a function of the predicted number of salient objects. In order to obtain the numerical features of an input image, we apply another network for subitizing. The output features f n of the subitizing network is directly used as the adaptive weight matrix for salient object detection. The subitizing network can therefore be viewed as a weight prediction network to encode numerical representation into the detection network. Eq. 3 can then be rewritten as: Back-propagation f o = f n f s +b. (4) The adaptive weight layer can be trained end-to-end using back-propagation. The derivatives of the input and output features in the adaptive weight layer can be computed using standard back-propagation. The derivative of the predicted weights with loss functionlis computed as: l l = f s. (5) f n f o 4.3. Salient Object Detection Network As mentioned earlier, we design the salient object detection network based on the convolution-deconvolution pipeline, and these two stages are connected by the adaptive weight layer. The convolution stage is based on the VGG-16 net [27] (with the last classification layer removed), while the deconvolution stage has a mirrored architecture of the convolution stage. This network is first pre-trained for semantic segmentation on the Pascal 2012 dataset [7] without the adaptive weight layer. This convolution-deconvolution pipeline, however, suffers from coarse prediction. We leverage two refinement approaches, skipped features [6] and hierarchical supervision [33], to obtain pixel-level accurate saliency map. The hierarchical supervision guides all the deconvolution layers with the ground truth, and these layers produce the side-output saliency maps. These side-outputs are then fused using a convolution layer to obtain the final result. We further adopt the post-processing techniques in [28] and [31] to obtain compact and boundary-preserved object regions Salient Object Subitizing Network A human is only able to identify up to 4 salient objects at a glance, effortlessly and consistently. In our work, salient object subitizing is treated as a classification task, and there are five categories in total, representing 0, 1, 2, 3, and 4+ salient objects existed in the image. Similar to the salient object detection network, the subitizing network is based on the VGG-16 net [27]. We modify the size of the input image and the number of filters of the last convolution layer, so that the output feature map can adapt to the size of the weight matrix in the adaptive weight layer. Specifically, the depths of the input and output features of the adaptive weight layer are both 512, and the kernel size is 1 1. As a result, the size of the weight matrix is Accordingly, we modify the input resolution of the first convolution layer in the subitizing network to , so that the output resolution of the final convolution layer can be The number of filters is set to 1024 in the final convolution layer. Thus, the output feature has a size of This feature is then reshaped to have the same size as the weight matrix. In addition to connecting to the adaptive weight layer, the last convolution layer is also connected to a fully connected layer followed by a classification layer to predict the existence and the number of salient objects. In other words, the subitizing network is trained by multi-task losses. Before integrating to the salient object detection network, the subitizing network is first pre-trained solely for the subitizing task on the SOS dataset [36] Training the Network The proposed network is trained end-to-end using backpropagation. However, multiple losses are involved in the network, making the training process non-trivial. For the hierarchical supervision, lower layers get mixed gradients if we activate all the hierarchical losses. We leverage a loss weight schedule to overcome this problem. The network is first trained with a loss weight of 1 for the lowest deconvolution layer, and 0 for all the others. During training, the weights of other layers are progressively increased while the lower supervisions are gradually deactivated. In this way, the network begins with learning the coarse representation, leading to a coarse-to-fine learning process. The two tasks of the subitizing network (i.e., predicting the weights of a layer and predicting the number of salient objects) are inherently different. As such, the pre-trained subitizing knowledge may not be perfectly suitable for the adaptive weight layer. During fine-tuning, we have found that biasing towards the loss from the adaptive weight layer (loss weights of 0.7 vs. 0.3) shows better adaptation in the weight prediction module. Due to the significant distribution change in the adaptive weight layer with respect to different input images, it is not easy to train an optimized model. Since batch normalization [12] helps generalize the distributions between layers, we apply it to the adaptive weight layer to alleviate this problem. This strategy is also employed in every 1063
6 convolution and deconvolution layers to prevent the training process from reaching a poor local minima. 5. Experiments The proposed method is implemented using MatConvnet [29] and tested on a PC with an i7 3.4GHz CPU, an Nvidia Titan X Pascal GPU, and 32GB RAM. The proposed network takes about 0.1s and the post-processing step takes about 2s to process an image of We train our model on the training set of the SOS dataset [36], which is the only dataset that contains both the number of salient objects and their bounding box labels. It contains 6,900 images selected from four datasets: MS COCO [20], Pascal VOC 2007 [7], ImageNet [5], and SUN [32]. To accurately learn the object boundaries, we segment all the salient objects from the bounding boxes using the available ground truth segmentations from MS COCO [20] and Pascal VOC 2007 [7]. For those images that are not selected from these two datasets, we keep the original bounding boxes for training. Some data augmentation approaches like cropping, shifting, and flipping are used during training. Our model takes 4-5 days for the training to converge Datasets and Evaluation Metrics As the proposed method is an unconstrained method, it is able to handle images without dominant objects. We evaluate the proposed method on the MSO dataset [36], which is the test set of the SOS dataset [36] for salient object detection. When comparing with the state-of-the-art methods, we further evaluate the proposed method on DUT- OMRON [35], Pascal-S [19], and SOD [22]. The MSO [36] and DUT-OMRON [35] datasets provide only the bounding box ground truth, while the others contain labelled segmentations. Although MSRA10K [4] is the largest dataset for salient object detection, most of the deep learning based models are trained on this dataset or its subset. Therefore, this dataset is not suitable for evaluation. We compare the proposed method to nine state-of-the-art methods: LEGS [30], MDF [17], DCL [18], RFCN [31], MAP [38], HS [34], GMR [35], MB+ [37], and MST [28]. The first five are deep learning based methods, and the others used hand-crafted features. Among them, only MAP [38] is an unconstrained method. As MAP outputs salient object bounding boxes, we binarize the outputs into saliency maps for evaluation. Three metrics are used to measure the detection performance: precision-recall (PR), F-measure, and mean absolute error (MAE). The PR curve is computed by thresholding the predicted saliency map into a set of binary masks, and these masks are compared against the ground truth. The F-measure is defined as: F β = (1+β2 ) precision recall β 2, (6) precision+recall Metric Ours Independent Cascaded Concatenated Shared F-Measure MAE Table 2: Comparison with different baselines on the Pascal- S dataset [19]. The proposed method outperforms the independent network (no sharing) and the three multi-task sharing networks. Method Full Backgd. only Sal. Object only Adap. Prec. MAE MAE Adap. Prec. MAE Ours MAP [38] Table 3: Unconstrained salient object detection evaluation on the MSO dataset [36]. The proposed method outperforms MAP [38] not only on images with salient objects, but also on background images. where β 2 is set to 0.3 to emphasize on precision [1]. An image dependent adaptive threshold [1] is used to compute F-measure, and is set to twice the mean value of the saliency map. The precision with adaptive threshold is also used in the evaluation on the unconstrained dataset (Section 5.2). MAE measures the average pixel-wise error, reflecting the negative saliency assignments Comparison with Baselines Before comparing with the state-of-the-art methods, we first compare the proposed method with different baseline networks. Four baselines are used, one of them is the independent network (no sharing), the others are the cascaded, concatenated, and shared networks. In the experiments, all these baseline networks compared are trained with the same amount of data (i.e., same number of epoches), using the same refinement and post-processing approaches. All the networks are trained on the SOS dataset [36], and tested on the Pascal-S dataset [19]. Evaluation on Subitizing Embedding. The first evaluation is to examine the effectiveness of subitizing embedding. Table 2 shows the comparison. We can see that integrating subitizing is effective in salient object detection, contributing to an overall F-measure improvement of about 10% and producing 20% less error. This implies that the numerical representation provides strong guidance in spatial representation, helping rectify the final prediction. Comparison with Multi-task Sharing. Table 2 also shows the comparison with the multi-task sharing networks. We can see that all the networks are effective in improving the detection performance, which shows that subitizing information is useful to the detection task. The cascaded network is not as prominent as the other multi-task sharing networks, as it is too deep to be properly trained. We add multiple losses to the concatenated network, and it can be considered as the closest architecture to ours. This setting 1064
7 1 DUT 1 ascal 0.9 SOD Precision Precision 0.6 Precision LEGS MDF DCL RFCN HS GMR MB+ MST Ours Recall 0.4 LEGS MDF DCL RFCN HS GMR MB+ MST Ours Recall LEGS MDF DCL RFCN HS GMR MB+ MST Ours Recall Figure 4: Comparison of precision-recall curves on three datasets. The proposed method consistently outperforms existing methods across all the datasets. Dataset Metric LEGS [30] MDF [17] DCL [18] RFCN [31] HS [34] GMR [35] MB+ [37] MST [28] Ours DUT-OMRON Pascal-S SOD F-measure MAE F-measure MAE F-measure MAE Table 4: Comparison of F-measure (larger is better) and MAE (smaller is better) on three datasets. The best results are in red, while the second best are in blue. is better than the cascaded network. The shared network achieves the best result among the multi-task sharing networks, due to its multi-loss supervision and also because we have selected the best architecture from Table 1. The proposed method outperforms all these knowledge sharing networks. The main reason is that the proposed adaptive weight layer dynamically enriches the representation space of the salient object detection network, parameters will be generated according to the input context Comparison with State of the art Methods Evaluation on the Unconstrained Dataset. As an unconstrained method, we first compare the proposed method with MAP [38] on the MSO dataset [36]. Beside the full MSO dataset, we further report the performance on background images only and on images with salient objects, to better verify the performance of subitizing embedding. As background images do not contain any positive samples (i.e., precision is always zero), F-measure is not valid and MAE is the best metric to measure the detection error. Table 3 shows the adaptive precision and MAE. We can see that even though MSO is more suitable for MAP (as the output of MAP and the ground truth are both bounding boxes), the proposed method achieves much better performance in terms of precision. (Our MAE is higher only because of the difference between our pixel-level segmentation and bounding box ground truth). Specifically, the proposed method performs better on background image identification. The main reason is that MAP does not involve the interaction between the subitizing and detection tasks. Evaluation on the Traditional Datasets. We then com- Method Ours 96.3% 98.0% 96.5% 97.3% 84.1% MSO [36] 89.1% 93.3% 92.6% 93.4% 79.0% Fine-tuned VGG 85.4% 90.5% 89.2% 90.1% 75.9% Table 5: Subitizing task comparison. The proposed method augmented subitizing strategy achieves the best results on the scenarios with different numbers of salient objects. pare with the other state-of-the-art methods on three general datasets. Fig. 4 and Table 4 show the quantitative comparison, and Fig. 5 shows the qualitative comparison. We can see that the proposed method consistently outperforms existing methods on all datasets on the PR curves, F-measure, and MAE. Compared to the other deep learning based methods, we embed subitizing knowledge in salient object detection and thus achieve better performance. As shown in Fig. 5, the proposed method consistently produces compact saliency maps that are closest to the ground truth. Note that in Fig. 5, the unconstrained method MAP [38] may misdetect the non-existence of salient objects Application: Detection Augmenting Subitizing As mentioned earlier salient object detection and subitizing are mutually involved in the human visual system. Hence, we are interested to find out if salient object detection may provide effective guidance to subitizing. To this end, we simply swap the objectives of the two networks. While salient object detection is used for weight prediction, subitizing produces our final prediction. Note that we do not need to change the network architecture. We just swap the adaptive weight layer in the detection network with the 1065
 MDF")
 MAP")
 MB+ (j)")
 GT Figure")


 - (f) are")
































































8 (a) Input (b) LEGS (c) MDF (d) DCL (e) RFCN (f) MAP (g) HS (h) GMR (i) MB+ (j) MST (k) Ours (l) GT Figure 5: Qualitative comparison of the state-of-the-art methods. (b) - (f) are deep learning based methods, while the others use hand-crafted features. The proposed method produces saliency maps closest to the ground truth Failure Cases Although detecting salient objects with subitizing guidance achieves good performances, the subitizing prediction may not necessarily agree with the ground truth on the number of salient objects. Fig. 6 shows two failure examples. As the subitizing network produces different numbers of salient objects from those of the ground truth, the salient object network outputs different saliency maps. 6. Conclusion (a) Input (b) GT (c) Ours Figure 6: Failure cases. The subitizing guidance may sometimes disagree with the ground truth saliency maps on the number of salient objects. convolution layer in the subitizing network. Table 5 shows the average precision scores. We can see that the proposed method outperforms MSO and a fine-tuned VGG network on the scenarios with different numbers of salient objects. This shows that while subitizing can help improve the performance of saliency object detection, saliency object detection can also help improve the performance of subitizing. In this paper, we have explored the interactions between numerical and spatial representations in salient object detection. In particular, we delve into the problem of multitask sharing networks, revealing that their performances are unpredictable and require enumerating all possible architectures to obtain the best one. To address the multi-task problem from a different point of view, we propose a multi-task deep neural network to detect salient objects with the augmentation of subitizing using dynamic weight prediction. Extensive experiments demonstrate that subitizing knowledge provides strong guidance to salient object detection, and the proposed method achieves state-of-the-art performance on four datasets. Acknowledgements. We would like to thank NVIDIA for generous donation of Titan X Pascal GPU cards for our experiments. 1066
9 References [1] R. Achanta, S. Hemami, F. Estrada, and S. Susstrunk. Frequency-tuned salient region detection. In CVPR, pages , [2] A. Borji, M. Cheng, H. Jiang, and J. Li. Salient object detection: A benchmark. IEEE TIP, 24(12): , [3] H. Burger, C. Schuler, and S. Harmeling. Image denoising: Can plain neural networks compete with BM3D? In CVPR, pages , [4] M. Cheng, N. Mitra, X. Huang, P. Torr, and S. Hu. Global contrast based salient region detection. IEEE TPAMI, 37(3): , [5] J. Deng, W. Dong, R. Socher, L. Li, K. Li, and L. Fei-Fei. Imagenet: A large-scale hierarchical image database. In CVPR, pages , [6] A. Dosovitskiy, P. Fischer, E. Ilg, P. Hausser, C. Hazirbas, V. Golkov, P. van der Smagt, D. Cremers, and T. Brox. Flownet: Learning optical flow with convolutional networks. In ICCV, pages , [7] M. Everingham, S. Eslami, L. van Gool, C. Williams, J. Winn, and A. Zisserman. The pascal visual object classes challenge: A retrospective. IJCV, 111(1):98 136, Jan , 6 [8] C. Farabet, C. Couprie, L. Najman, and Y. LeCun. Learning hierarchical features for scene labeling. IEEE TPAMI, 35(8): , [9] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In CVPR, [10] S. He, R. Lau, W. Liu, Z. Huang, and Q. Yang. Supercnn: A superpixelwise convolutional neural network for salient object detection. IJCV, 115(3): , [11] E. Hubbard, M. Piazza, P. Pinel, and S. Dehaene. Interactions between number and space in parietal cortex. Nature Reviews Neuroscience, 6(6): , [12] S. Ioffe and C. Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In ICML, pages , [13] E. Kaufman, M. Lord, T. Reese, and J. Volkmann. The discrimination of visual number. The American Journal of Psychology, 62(4): , [14] A. Krizhevsky, I. Sutskever, and G. Hinton. Imagenet classification with deep convolutional neural networks. In NIPS, pages , [15] J. Kuen, Z. Wang, and G. Wang. Recurrent attentional networks for saliency detection. In CVPR, June [16] J. Lei Ba, K. Swersky, S. Fidler, et al. Predicting deep zeroshot convolutional neural networks using textual descriptions. In CVPR, pages , [17] G. Li and Y. Yu. Visual saliency based on multiscale deep features. In CVPR, pages , , 6, 7 [18] G. Li and Y. Yu. Deep contrast learning for salient object detection. In CVPR, June , 6, 7 [19] Y. Li, X. Hou, C. Koch, J. Rehg, and A. Yuille. The secrets of salient object segmentation. In CVPR, [20] T. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollár, and C. Zitnick. Microsoft COCO: Common objects in context. In ECCV [21] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In CVPR, pages , , 3 [22] D. Martin, C. Fowlkes, D. Tal, and J. Malik. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In ICCV, pages , [23] H. Noh, S. Hong, and B. Han. Learning deconvolution network for semantic segmentation. In ICCV, [24] H. Noh, P. Hongsuck Seo, and B. Han. Image question answering using convolutional neural network with dynamic parameter prediction. In CVPR, June [25] C. Olivers and D. Watson. Subitizing requires attention. Visual Cognition, 16(4): , [26] H. Railo, M. Koivisto, A. Revonsuo, and M. Hannula. The role of attention in subitizing. Cognition, 107(1):82 104, [27] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition [28] W. Tu, S. He, Q. Yang, and S. Chien. Real-time salient object detection with a minimum spanning tree. In CVPR, , 6, 7 [29] A. Vedaldi and K. Lenc. MatConvNet convolutional neural networks for MATLAB. In ACM Multimedia, [30] L. Wang, H. Lu, X. Ruan, and M.-H. Yang. Deep networks for saliency detection via local estimation and global search. In CVPR, pages , , 6, 7 [31] L. Wang, L. Wang, H. Lu, P. Zhang, and X. Ruan. Saliency detection with recurrent fully convolutional networks. In ECCV, pages , , 5, 6, 7 [32] J. Xiao, J. Hays, K. Ehinger, A. Oliva, and A. Torralba. Sun database: Large-scale scene recognition from abbey to zoo. In CVPR, pages , [33] S. Xie and Z. Tu. Holistically-nested edge detection. In ICCV, pages , [34] Q. Yan, L. Xu, J. Shi, and J. Jia. Hierachical saliency detection. In CVPR, , 7 [35] C. Yang, L. Zhang, H. Lu, X. Ruan, and M. Yang. Saliency detection via graph-based manifold ranking. In CVPR, , 7 [36] J. Zhang, S. Ma, M. Sameki, S. Sclaroff, M. Betke, Z. Lin, X. Shen, B. Price, and R. Mech. Salient object subitizing. In CVPR, pages , , 3, 5, 6, 7 [37] J. Zhang, S. Sclaroff, Z. Lin, X. Shen, B. Price, and R. Mech. Minimum barrier salient object detection at 80 fps. In ICCV, pages , , 7 [38] J. Zhang, S. Sclaroff, Z. Lin, X. Shen, B. Price, and R. Mech. Unconstrained salient object detection via proposal subset optimization. In CVPR, , 6, 7 [39] R. Zhao, W. Ouyang, H. Li, and X. Wang. Saliency detection by multi-context deep learning. In CVPR,
Visual Saliency Based on Multiscale Deep Features Supplementary Material
 Visual Saliency Based on Multiscale Deep Features Supplementary Material Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/
Visual Saliency Based on Multiscale Deep Features Supplementary Material Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/
arxiv: v1 [cs.cv] 2 Jun 2017
![arxiv: v1 [cs.cv] 2 Jun 2017](/thumbs/74/71415505.jpg "arxiv: v1 [cs.cv] 2 Jun 2017") INTEGRATED DEEP AND SHALLOW NETWORKS FOR SALIENT OBJECT DETECTION Jing Zhang 1,2, Bo Li 1, Yuchao Dai 2, Fatih Porikli 2 and Mingyi He 1 1 School of Electronics and Information, Northwestern Polytechnical
INTEGRATED DEEP AND SHALLOW NETWORKS FOR SALIENT OBJECT DETECTION Jing Zhang 1,2, Bo Li 1, Yuchao Dai 2, Fatih Porikli 2 and Mingyi He 1 1 School of Electronics and Information, Northwestern Polytechnical
Look, Perceive and Segment: Finding the Salient Objects in Images via Two-stream Fixation-Semantic CNNs
 Look, Perceive and Segment: Finding the Salient Objects in Images via Two-stream Fixation-Semantic CNNs Xiaowu Chen 1, Anlin Zheng 1, Jia Li 1,2, Feng Lu 1,2 1 State Key Laboratory of Virtual Reality Technology
Look, Perceive and Segment: Finding the Salient Objects in Images via Two-stream Fixation-Semantic CNNs Xiaowu Chen 1, Anlin Zheng 1, Jia Li 1,2, Feng Lu 1,2 1 State Key Laboratory of Virtual Reality Technology
Multi-Scale Salient Object Detection with Pyramid Spatial Pooling
 Multi-Scale Salient Object Detection with Pyramid Spatial Pooling Jing Zhang, Yuchao Dai, Fatih Porikli and Mingyi He School of Electronics and Information, Northwestern Polytechnical University, China.
Multi-Scale Salient Object Detection with Pyramid Spatial Pooling Jing Zhang, Yuchao Dai, Fatih Porikli and Mingyi He School of Electronics and Information, Northwestern Polytechnical University, China.
Progressive Attention Guided Recurrent Network for Salient Object Detection
 Progressive Attention Guided Recurrent Network for Salient Object Detection Xiaoning Zhang, Tiantian Wang, Jinqing Qi, Huchuan Lu, Gang Wang Dalian University of Technology, China Alibaba AILabs, China
Progressive Attention Guided Recurrent Network for Salient Object Detection Xiaoning Zhang, Tiantian Wang, Jinqing Qi, Huchuan Lu, Gang Wang Dalian University of Technology, China Alibaba AILabs, China
Multi-attention Guided Activation Propagation in CNNs
 Multi-attention Guided Activation Propagation in CNNs Xiangteng He and Yuxin Peng (B) Institute of Computer Science and Technology, Peking University, Beijing, China pengyuxin@pku.edu.cn Abstract. CNNs
Multi-attention Guided Activation Propagation in CNNs Xiangteng He and Yuxin Peng (B) Institute of Computer Science and Technology, Peking University, Beijing, China pengyuxin@pku.edu.cn Abstract. CNNs
arxiv: v1 [cs.cv] 28 Dec 2018
![arxiv: v1 [cs.cv] 28 Dec 2018](/thumbs/93/111330693.jpg "arxiv: v1 [cs.cv] 28 Dec 2018") Salient Object Detection via High-to-Low Hierarchical Context Aggregation Yun Liu 1 Yu Qiu 1 Le Zhang 2 JiaWang Bian 1 Guang-Yu Nie 3 Ming-Ming Cheng 1 1 Nankai University 2 A*STAR 3 Beijing Institute
Salient Object Detection via High-to-Low Hierarchical Context Aggregation Yun Liu 1 Yu Qiu 1 Le Zhang 2 JiaWang Bian 1 Guang-Yu Nie 3 Ming-Ming Cheng 1 1 Nankai University 2 A*STAR 3 Beijing Institute
Task-driven Webpage Saliency
 Task-driven Webpage Saliency Quanlong Zheng 1[0000 0001 5059 0078], Jianbo Jiao 1,2[0000 0003 0833 5115], Ying Cao 1[0000 0002 9288 3167], and Rynson W.H. Lau 1[0000 0002 8957 8129] 1 Department of Computer
Task-driven Webpage Saliency Quanlong Zheng 1[0000 0001 5059 0078], Jianbo Jiao 1,2[0000 0003 0833 5115], Ying Cao 1[0000 0002 9288 3167], and Rynson W.H. Lau 1[0000 0002 8957 8129] 1 Department of Computer
Hierarchical Convolutional Features for Visual Tracking
 Hierarchical Convolutional Features for Visual Tracking Chao Ma Jia-Bin Huang Xiaokang Yang Ming-Husan Yang SJTU UIUC SJTU UC Merced ICCV 2015 Background Given the initial state (position and scale), estimate
Hierarchical Convolutional Features for Visual Tracking Chao Ma Jia-Bin Huang Xiaokang Yang Ming-Husan Yang SJTU UIUC SJTU UC Merced ICCV 2015 Background Given the initial state (position and scale), estimate
Holistically-Nested Edge Detection (HED)
") Holistically-Nested Edge Detection (HED) Saining Xie, Zhuowen Tu Presented by Yuxin Wu February 10, 20 What is an Edge? Local intensity change? Used in traditional methods: Canny, Sobel, etc Learn it!
Holistically-Nested Edge Detection (HED) Saining Xie, Zhuowen Tu Presented by Yuxin Wu February 10, 20 What is an Edge? Local intensity change? Used in traditional methods: Canny, Sobel, etc Learn it!
Reverse Attention for Salient Object Detection
 Reverse Attention for Salient Object Detection Shuhan Chen [0000 0002 0094 5157], Xiuli Tan, Ben Wang, and Xuelong Hu School of Information Engineering, Yangzhou University, China {c.shuhan, t.xiuli0214}@gmail.com,
Reverse Attention for Salient Object Detection Shuhan Chen [0000 0002 0094 5157], Xiuli Tan, Ben Wang, and Xuelong Hu School of Information Engineering, Yangzhou University, China {c.shuhan, t.xiuli0214}@gmail.com,
Exemplar-Driven Top-Down Saliency Detection via Deep Association
 Exemplar-Driven Top-Down Saliency Detection via Deep Association Shengfeng He 1, Rynson W.H. Lau 1, and Qingxiong Yang 2 1 Department of Computer Science, City University of Hong Kong 2 School of Information
Exemplar-Driven Top-Down Saliency Detection via Deep Association Shengfeng He 1, Rynson W.H. Lau 1, and Qingxiong Yang 2 1 Department of Computer Science, City University of Hong Kong 2 School of Information
Deeply-Supervised Recurrent Convolutional Neural Network for Saliency Detection
 Deeply-Supervised Recurrent Convolutional Neural Netork for Saliency Detection Youbao Tang Xiangqian Wu School of Computer Science and Technology Harbin Institute of Technology Harbin 150001 China {tangyoubao
Deeply-Supervised Recurrent Convolutional Neural Netork for Saliency Detection Youbao Tang Xiangqian Wu School of Computer Science and Technology Harbin Institute of Technology Harbin 150001 China {tangyoubao
CSE Introduction to High-Perfomance Deep Learning ImageNet & VGG. Jihyung Kil
 CSE 5194.01 - Introduction to High-Perfomance Deep Learning ImageNet & VGG Jihyung Kil ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton,
CSE 5194.01 - Introduction to High-Perfomance Deep Learning ImageNet & VGG Jihyung Kil ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton,
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik UC Berkeley Tech Report @ http://arxiv.org/abs/1311.2524! Detection
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick, Jeff Donahue, Trevor Darrell, Jitendra Malik UC Berkeley Tech Report @ http://arxiv.org/abs/1311.2524! Detection
Y-Net: Joint Segmentation and Classification for Diagnosis of Breast Biopsy Images
 Y-Net: Joint Segmentation and Classification for Diagnosis of Breast Biopsy Images Sachin Mehta 1, Ezgi Mercan 1, Jamen Bartlett 2, Donald Weaver 2, Joann G. Elmore 1, and Linda Shapiro 1 1 University
Y-Net: Joint Segmentation and Classification for Diagnosis of Breast Biopsy Images Sachin Mehta 1, Ezgi Mercan 1, Jamen Bartlett 2, Donald Weaver 2, Joann G. Elmore 1, and Linda Shapiro 1 1 University
Object Detectors Emerge in Deep Scene CNNs
 Object Detectors Emerge in Deep Scene CNNs Bolei Zhou, Aditya Khosla, Agata Lapedriza, Aude Oliva, Antonio Torralba Presented By: Collin McCarthy Goal: Understand how objects are represented in CNNs Are
Object Detectors Emerge in Deep Scene CNNs Bolei Zhou, Aditya Khosla, Agata Lapedriza, Aude Oliva, Antonio Torralba Presented By: Collin McCarthy Goal: Understand how objects are represented in CNNs Are
Deep Salient Object Detection by Integrating Multi-level Cues
 Deep Salient Object Detection by Integrating Multi-level Cues Jing Zhang 1,2 Yuchao Dai 2 and Fatih Porikli 2 1 School of Electronics and Information, Northwestern Polytechnical University, Xi an, China
Deep Salient Object Detection by Integrating Multi-level Cues Jing Zhang 1,2 Yuchao Dai 2 and Fatih Porikli 2 1 School of Electronics and Information, Northwestern Polytechnical University, Xi an, China
EXEMPLAR BASED IMAGE SALIENT OBJECT DETECTION. {zzwang, ruihuang, lwan,
 EXEMPLAR BASED IMAGE SALIENT OBJECT DETECTION Zezheng Wang Rui Huang, Liang Wan 2 Wei Feng School of Computer Science and Technology, Tianjin University, Tianjin, China 2 School of Computer Software, Tianjin
EXEMPLAR BASED IMAGE SALIENT OBJECT DETECTION Zezheng Wang Rui Huang, Liang Wan 2 Wei Feng School of Computer Science and Technology, Tianjin University, Tianjin, China 2 School of Computer Software, Tianjin
When Saliency Meets Sentiment: Understanding How Image Content Invokes Emotion and Sentiment
 When Saliency Meets Sentiment: Understanding How Image Content Invokes Emotion and Sentiment Honglin Zheng1, Tianlang Chen2, Jiebo Luo3 Department of Computer Science University of Rochester, Rochester,
When Saliency Meets Sentiment: Understanding How Image Content Invokes Emotion and Sentiment Honglin Zheng1, Tianlang Chen2, Jiebo Luo3 Department of Computer Science University of Rochester, Rochester,
Convolutional Neural Networks (CNN)
") Convolutional Neural Networks (CNN) Algorithm and Some Applications in Computer Vision Luo Hengliang Institute of Automation June 10, 2014 Luo Hengliang (Institute of Automation) Convolutional Neural Networks
Convolutional Neural Networks (CNN) Algorithm and Some Applications in Computer Vision Luo Hengliang Institute of Automation June 10, 2014 Luo Hengliang (Institute of Automation) Convolutional Neural Networks
Video Saliency Detection via Dynamic Consistent Spatio- Temporal Attention Modelling
 AAAI -13 July 16, 2013 Video Saliency Detection via Dynamic Consistent Spatio- Temporal Attention Modelling Sheng-hua ZHONG 1, Yan LIU 1, Feifei REN 1,2, Jinghuan ZHANG 2, Tongwei REN 3 1 Department of
AAAI -13 July 16, 2013 Video Saliency Detection via Dynamic Consistent Spatio- Temporal Attention Modelling Sheng-hua ZHONG 1, Yan LIU 1, Feifei REN 1,2, Jinghuan ZHANG 2, Tongwei REN 3 1 Department of
Learning to Detect Salient Objects with Image-level Supervision
 Learning to Detect Salient Objects with Image-level Supervision Lijun Wang 1, Huchuan Lu 1, Yifan Wang 1, Mengyang Feng 1 Dong Wang 1, Baocai Yin 1, and Xiang Ruan 2 1 Dalian University of Technology,
Learning to Detect Salient Objects with Image-level Supervision Lijun Wang 1, Huchuan Lu 1, Yifan Wang 1, Mengyang Feng 1 Dong Wang 1, Baocai Yin 1, and Xiang Ruan 2 1 Dalian University of Technology,
B657: Final Project Report Holistically-Nested Edge Detection
 B657: Final roject Report Holistically-Nested Edge Detection Mingze Xu & Hanfei Mei May 4, 2016 Abstract Holistically-Nested Edge Detection (HED), which is a novel edge detection method based on fully
B657: Final roject Report Holistically-Nested Edge Detection Mingze Xu & Hanfei Mei May 4, 2016 Abstract Holistically-Nested Edge Detection (HED), which is a novel edge detection method based on fully
arxiv: v2 [cs.cv] 7 Jun 2018
![arxiv: v2 [cs.cv] 7 Jun 2018](/thumbs/79/79761281.jpg "arxiv: v2 [cs.cv] 7 Jun 2018") Deep supervision with additional labels for retinal vessel segmentation task Yishuo Zhang and Albert C.S. Chung Lo Kwee-Seong Medical Image Analysis Laboratory, Department of Computer Science and Engineering,
Deep supervision with additional labels for retinal vessel segmentation task Yishuo Zhang and Albert C.S. Chung Lo Kwee-Seong Medical Image Analysis Laboratory, Department of Computer Science and Engineering,
Salient Object Detection in RGB-D Image Based on Saliency Fusion and Propagation
 Salient Object Detection in RGB-D Image Based on Saliency Fusion and Propagation Jingfan Guo,, Tongwei Ren,,, Jia Bei,, Yujin Zhu State Key Laboratory for Novel Software Technology, Nanjing University,
Salient Object Detection in RGB-D Image Based on Saliency Fusion and Propagation Jingfan Guo,, Tongwei Ren,,, Jia Bei,, Yujin Zhu State Key Laboratory for Novel Software Technology, Nanjing University,
Efficient Deep Model Selection
 Efficient Deep Model Selection Jose Alvarez Researcher Data61, CSIRO, Australia GTC, May 9 th 2017 www.josemalvarez.net conv1 conv2 conv3 conv4 conv5 conv6 conv7 conv8 softmax prediction???????? Num Classes
Efficient Deep Model Selection Jose Alvarez Researcher Data61, CSIRO, Australia GTC, May 9 th 2017 www.josemalvarez.net conv1 conv2 conv3 conv4 conv5 conv6 conv7 conv8 softmax prediction???????? Num Classes
A Deep Multi-Level Network for Saliency Prediction
 A Deep Multi-Level Network for Saliency Prediction Marcella Cornia, Lorenzo Baraldi, Giuseppe Serra and Rita Cucchiara Dipartimento di Ingegneria Enzo Ferrari Università degli Studi di Modena e Reggio
A Deep Multi-Level Network for Saliency Prediction Marcella Cornia, Lorenzo Baraldi, Giuseppe Serra and Rita Cucchiara Dipartimento di Ingegneria Enzo Ferrari Università degli Studi di Modena e Reggio
LSTD: A Low-Shot Transfer Detector for Object Detection
 LSTD: A Low-Shot Transfer Detector for Object Detection Hao Chen 1,2, Yali Wang 1, Guoyou Wang 2, Yu Qiao 1,3 1 Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, China 2 Huazhong
LSTD: A Low-Shot Transfer Detector for Object Detection Hao Chen 1,2, Yali Wang 1, Guoyou Wang 2, Yu Qiao 1,3 1 Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, China 2 Huazhong
Active Deformable Part Models Inference
 Active Deformable Part Models Inference Menglong Zhu Nikolay Atanasov George J. Pappas Kostas Daniilidis GRASP Laboratory, University of Pennsylvania 3330 Walnut Street, Philadelphia, PA 19104, USA Abstract.
Active Deformable Part Models Inference Menglong Zhu Nikolay Atanasov George J. Pappas Kostas Daniilidis GRASP Laboratory, University of Pennsylvania 3330 Walnut Street, Philadelphia, PA 19104, USA Abstract.
arxiv: v1 [cs.cv] 26 Jul 2016
![arxiv: v1 [cs.cv] 26 Jul 2016](/thumbs/85/91342829.jpg "arxiv: v1 [cs.cv] 26 Jul 2016") Noname manuscript No. (will be inserted by the editor) Salient Object Subitizing Jianming Zhang Shugao Ma Mehrnoosh Sameki Stan Sclaroff Margrit Betke Zhe Lin Xiaohui Shen Brian Price Radomír Měch arxiv:67.755v
Noname manuscript No. (will be inserted by the editor) Salient Object Subitizing Jianming Zhang Shugao Ma Mehrnoosh Sameki Stan Sclaroff Margrit Betke Zhe Lin Xiaohui Shen Brian Price Radomír Měch arxiv:67.755v
arxiv: v2 [cs.cv] 22 Mar 2018
![arxiv: v2 [cs.cv] 22 Mar 2018](/thumbs/94/122062874.jpg "arxiv: v2 [cs.cv] 22 Mar 2018") Deep saliency: What is learnt by a deep network about saliency? Sen He 1 Nicolas Pugeault 1 arxiv:1801.04261v2 [cs.cv] 22 Mar 2018 Abstract Deep convolutional neural networks have achieved impressive performance
Deep saliency: What is learnt by a deep network about saliency? Sen He 1 Nicolas Pugeault 1 arxiv:1801.04261v2 [cs.cv] 22 Mar 2018 Abstract Deep convolutional neural networks have achieved impressive performance
VIDEO SALIENCY INCORPORATING SPATIOTEMPORAL CUES AND UNCERTAINTY WEIGHTING
 VIDEO SALIENCY INCORPORATING SPATIOTEMPORAL CUES AND UNCERTAINTY WEIGHTING Yuming Fang, Zhou Wang 2, Weisi Lin School of Computer Engineering, Nanyang Technological University, Singapore 2 Department of
VIDEO SALIENCY INCORPORATING SPATIOTEMPORAL CUES AND UNCERTAINTY WEIGHTING Yuming Fang, Zhou Wang 2, Weisi Lin School of Computer Engineering, Nanyang Technological University, Singapore 2 Department of
AS AN important and challenging problem in computer
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 25, NO. 8, AUGUST 2016 3919 DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, Ming-Hsuan Yang, Senior
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 25, NO. 8, AUGUST 2016 3919 DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, Ming-Hsuan Yang, Senior
Object-Level Saliency Detection Combining the Contrast and Spatial Compactness Hypothesis
 Object-Level Saliency Detection Combining the Contrast and Spatial Compactness Hypothesis Chi Zhang 1, Weiqiang Wang 1, 2, and Xiaoqian Liu 1 1 School of Computer and Control Engineering, University of
Object-Level Saliency Detection Combining the Contrast and Spatial Compactness Hypothesis Chi Zhang 1, Weiqiang Wang 1, 2, and Xiaoqian Liu 1 1 School of Computer and Control Engineering, University of
What is and What is not a Salient Object? Learning Salient Object Detector by Ensembling Linear Exemplar Regressors
 What is and What is not a Salient Object? Learning Salient Object Detector by Ensembling Linear Exemplar Regressors Changqun Xia 1, Jia Li 1,2, Xiaowu Chen 1, Anlin Zheng 1, Yu Zhang 1 1 State Key Laboratory
What is and What is not a Salient Object? Learning Salient Object Detector by Ensembling Linear Exemplar Regressors Changqun Xia 1, Jia Li 1,2, Xiaowu Chen 1, Anlin Zheng 1, Yu Zhang 1 1 State Key Laboratory
Differential Attention for Visual Question Answering
 Differential Attention for Visual Question Answering Badri Patro and Vinay P. Namboodiri IIT Kanpur { badri,vinaypn }@iitk.ac.in Abstract In this paper we aim to answer questions based on images when provided
Differential Attention for Visual Question Answering Badri Patro and Vinay P. Namboodiri IIT Kanpur { badri,vinaypn }@iitk.ac.in Abstract In this paper we aim to answer questions based on images when provided
A Visual Saliency Map Based on Random Sub-Window Means
 A Visual Saliency Map Based on Random Sub-Window Means Tadmeri Narayan Vikram 1,2, Marko Tscherepanow 1 and Britta Wrede 1,2 1 Applied Informatics Group 2 Research Institute for Cognition and Robotics
A Visual Saliency Map Based on Random Sub-Window Means Tadmeri Narayan Vikram 1,2, Marko Tscherepanow 1 and Britta Wrede 1,2 1 Applied Informatics Group 2 Research Institute for Cognition and Robotics
Deep Visual Attention Prediction
 IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Deep Visual Attention Prediction Wenguan Wang, and Jianbing Shen, Senior Member, IEEE arxiv:1705.02544v3 [cs.cv] 22 Mar 2018 Abstract In this work, we aim to predict
IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Deep Visual Attention Prediction Wenguan Wang, and Jianbing Shen, Senior Member, IEEE arxiv:1705.02544v3 [cs.cv] 22 Mar 2018 Abstract In this work, we aim to predict
Shu Kong. Department of Computer Science, UC Irvine
 Ubiquitous Fine-Grained Computer Vision Shu Kong Department of Computer Science, UC Irvine Outline 1. Problem definition 2. Instantiation 3. Challenge and philosophy 4. Fine-grained classification with
Ubiquitous Fine-Grained Computer Vision Shu Kong Department of Computer Science, UC Irvine Outline 1. Problem definition 2. Instantiation 3. Challenge and philosophy 4. Fine-grained classification with
arxiv: v1 [cs.cv] 13 Jul 2018
![arxiv: v1 [cs.cv] 13 Jul 2018](/thumbs/84/89699669.jpg "arxiv: v1 [cs.cv] 13 Jul 2018") Multi-Scale Convolutional-Stack Aggregation for Robust White Matter Hyperintensities Segmentation Hongwei Li 1, Jianguo Zhang 3, Mark Muehlau 2, Jan Kirschke 2, and Bjoern Menze 1 arxiv:1807.05153v1 [cs.cv]
Multi-Scale Convolutional-Stack Aggregation for Robust White Matter Hyperintensities Segmentation Hongwei Li 1, Jianguo Zhang 3, Mark Muehlau 2, Jan Kirschke 2, and Bjoern Menze 1 arxiv:1807.05153v1 [cs.cv]
Comparison of Two Approaches for Direct Food Calorie Estimation
 Comparison of Two Approaches for Direct Food Calorie Estimation Takumi Ege and Keiji Yanai Department of Informatics, The University of Electro-Communications, Tokyo 1-5-1 Chofugaoka, Chofu-shi, Tokyo
Comparison of Two Approaches for Direct Food Calorie Estimation Takumi Ege and Keiji Yanai Department of Informatics, The University of Electro-Communications, Tokyo 1-5-1 Chofugaoka, Chofu-shi, Tokyo
Supplementary Material for submission 2147: Traditional Saliency Reloaded: A Good Old Model in New Shape
 Sulementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shae Simone Frintro, Thomas Werner, and Germán M. García Institute of Comuter Science III Rheinische Friedrich-Wilhelms-Universität
Sulementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shae Simone Frintro, Thomas Werner, and Germán M. García Institute of Comuter Science III Rheinische Friedrich-Wilhelms-Universität
Shu Kong. Department of Computer Science, UC Irvine
 Ubiquitous Fine-Grained Computer Vision Shu Kong Department of Computer Science, UC Irvine Outline 1. Problem definition 2. Instantiation 3. Challenge 4. Fine-grained classification with holistic representation
Ubiquitous Fine-Grained Computer Vision Shu Kong Department of Computer Science, UC Irvine Outline 1. Problem definition 2. Instantiation 3. Challenge 4. Fine-grained classification with holistic representation
arxiv: v3 [cs.cv] 1 Jul 2018
![arxiv: v3 [cs.cv] 1 Jul 2018](/thumbs/83/87692676.jpg "arxiv: v3 [cs.cv] 1 Jul 2018") 1 Computer Vision and Image Understanding journal homepage: www.elsevier.com SalGAN: visual saliency prediction with adversarial networks arxiv:1701.01081v3 [cs.cv] 1 Jul 2018 Junting Pan a, Cristian Canton-Ferrer
1 Computer Vision and Image Understanding journal homepage: www.elsevier.com SalGAN: visual saliency prediction with adversarial networks arxiv:1701.01081v3 [cs.cv] 1 Jul 2018 Junting Pan a, Cristian Canton-Ferrer
Salient Object Detection Driven by Fixation Prediction
 Salient Object Detection Driven by Fixation Prediction Wenguan Wang 1, Jianbing Shen 1,2, Xingping Dong 1, Ali Borji 3 1 Beijing Lab of Intelligent Information Technology, School of Computer Science, Beijing
Salient Object Detection Driven by Fixation Prediction Wenguan Wang 1, Jianbing Shen 1,2, Xingping Dong 1, Ali Borji 3 1 Beijing Lab of Intelligent Information Technology, School of Computer Science, Beijing
Computational modeling of visual attention and saliency in the Smart Playroom
 Computational modeling of visual attention and saliency in the Smart Playroom Andrew Jones Department of Computer Science, Brown University Abstract The two canonical modes of human visual attention bottomup
Computational modeling of visual attention and saliency in the Smart Playroom Andrew Jones Department of Computer Science, Brown University Abstract The two canonical modes of human visual attention bottomup
Multi-Level Net: a Visual Saliency Prediction Model
 Multi-Level Net: a Visual Saliency Prediction Model Marcella Cornia, Lorenzo Baraldi, Giuseppe Serra, Rita Cucchiara Department of Engineering Enzo Ferrari, University of Modena and Reggio Emilia {name.surname}@unimore.it
Multi-Level Net: a Visual Saliency Prediction Model Marcella Cornia, Lorenzo Baraldi, Giuseppe Serra, Rita Cucchiara Department of Engineering Enzo Ferrari, University of Modena and Reggio Emilia {name.surname}@unimore.it
arxiv: v1 [cs.cv] 12 Apr 2016
![arxiv: v1 [cs.cv] 12 Apr 2016](/thumbs/73/69501963.jpg "arxiv: v1 [cs.cv] 12 Apr 2016") Recurrent Attentional Networks for Saliency Detection arxiv:1604.03227v1 [cs.cv] 12 Apr 2016 Abstract Convolutional-deconvolution networks can be adopted to perform end-to-end saliency detection. But,
Recurrent Attentional Networks for Saliency Detection arxiv:1604.03227v1 [cs.cv] 12 Apr 2016 Abstract Convolutional-deconvolution networks can be adopted to perform end-to-end saliency detection. But,
Medical Image Analysis
 Medical Image Analysis 1 Co-trained convolutional neural networks for automated detection of prostate cancer in multiparametric MRI, 2017, Medical Image Analysis 2 Graph-based prostate extraction in t2-weighted
Medical Image Analysis 1 Co-trained convolutional neural networks for automated detection of prostate cancer in multiparametric MRI, 2017, Medical Image Analysis 2 Graph-based prostate extraction in t2-weighted
Region Proposals. Jan Hosang, Rodrigo Benenson, Piotr Dollar, Bernt Schiele
 Region Proposals Jan Hosang, Rodrigo Benenson, Piotr Dollar, Bernt Schiele Who has read a proposal paper? 2 Who has read a proposal paper? Who knows what Average Recall is? 2 Who has read a proposal paper?
Region Proposals Jan Hosang, Rodrigo Benenson, Piotr Dollar, Bernt Schiele Who has read a proposal paper? 2 Who has read a proposal paper? Who knows what Average Recall is? 2 Who has read a proposal paper?
arxiv: v1 [stat.ml] 23 Jan 2017
![arxiv: v1 [stat.ml] 23 Jan 2017](/thumbs/81/83414183.jpg "arxiv: v1 [stat.ml] 23 Jan 2017") Learning what to look in chest X-rays with a recurrent visual attention model arxiv:1701.06452v1 [stat.ml] 23 Jan 2017 Petros-Pavlos Ypsilantis Department of Biomedical Engineering King s College London
Learning what to look in chest X-rays with a recurrent visual attention model arxiv:1701.06452v1 [stat.ml] 23 Jan 2017 Petros-Pavlos Ypsilantis Department of Biomedical Engineering King s College London
arxiv: v2 [cs.cv] 19 Dec 2017
![arxiv: v2 [cs.cv] 19 Dec 2017](/thumbs/89/97557782.jpg "arxiv: v2 [cs.cv] 19 Dec 2017") An Ensemble of Deep Convolutional Neural Networks for Alzheimer s Disease Detection and Classification arxiv:1712.01675v2 [cs.cv] 19 Dec 2017 Jyoti Islam Department of Computer Science Georgia State University
An Ensemble of Deep Convolutional Neural Networks for Alzheimer s Disease Detection and Classification arxiv:1712.01675v2 [cs.cv] 19 Dec 2017 Jyoti Islam Department of Computer Science Georgia State University
arxiv: v1 [cs.cv] 21 Nov 2018
![arxiv: v1 [cs.cv] 21 Nov 2018](/thumbs/93/113462225.jpg "arxiv: v1 [cs.cv] 21 Nov 2018") Rethinking ImageNet Pre-training Kaiming He Ross Girshick Piotr Dollár Facebook AI Research (FAIR) arxiv:1811.8883v1 [cs.cv] 21 Nov 218 Abstract We report competitive results on object detection and instance
Rethinking ImageNet Pre-training Kaiming He Ross Girshick Piotr Dollár Facebook AI Research (FAIR) arxiv:1811.8883v1 [cs.cv] 21 Nov 218 Abstract We report competitive results on object detection and instance
HHS Public Access Author manuscript Med Image Comput Comput Assist Interv. Author manuscript; available in PMC 2018 January 04.
 Discriminative Localization in CNNs for Weakly-Supervised Segmentation of Pulmonary Nodules Xinyang Feng 1, Jie Yang 1, Andrew F. Laine 1, and Elsa D. Angelini 1,2 1 Department of Biomedical Engineering,
Discriminative Localization in CNNs for Weakly-Supervised Segmentation of Pulmonary Nodules Xinyang Feng 1, Jie Yang 1, Andrew F. Laine 1, and Elsa D. Angelini 1,2 1 Department of Biomedical Engineering,
Network Dissection: Quantifying Interpretability of Deep Visual Representation
 Name: Pingchuan Ma Student number: 3526400 Date: August 19, 2018 Seminar: Explainable Machine Learning Lecturer: PD Dr. Ullrich Köthe SS 2018 Quantifying Interpretability of Deep Visual Representation
Name: Pingchuan Ma Student number: 3526400 Date: August 19, 2018 Seminar: Explainable Machine Learning Lecturer: PD Dr. Ullrich Köthe SS 2018 Quantifying Interpretability of Deep Visual Representation
Putting Context into. Vision. September 15, Derek Hoiem
 Putting Context into Vision Derek Hoiem September 15, 2004 Questions to Answer What is context? How is context used in human vision? How is context currently used in computer vision? Conclusions Context
Putting Context into Vision Derek Hoiem September 15, 2004 Questions to Answer What is context? How is context used in human vision? How is context currently used in computer vision? Conclusions Context
arxiv: v2 [cs.cv] 3 Jun 2018
![arxiv: v2 [cs.cv] 3 Jun 2018](/thumbs/89/97775247.jpg "arxiv: v2 [cs.cv] 3 Jun 2018") S4ND: Single-Shot Single-Scale Lung Nodule Detection Naji Khosravan and Ulas Bagci Center for Research in Computer Vision (CRCV), School of Computer Science, University of Central Florida, Orlando, FL.
S4ND: Single-Shot Single-Scale Lung Nodule Detection Naji Khosravan and Ulas Bagci Center for Research in Computer Vision (CRCV), School of Computer Science, University of Central Florida, Orlando, FL.
arxiv: v1 [cs.cv] 4 Jul 2018
![arxiv: v1 [cs.cv] 4 Jul 2018](/thumbs/92/108878310.jpg "arxiv: v1 [cs.cv] 4 Jul 2018") Noname manuscript No. (will be inserted by the editor) An Integration of Bottom-up and Top-Down Salient Cues on RGB-D Data: Saliency from Objectness vs. Non-Objectness Nevrez Imamoglu Wataru Shimoda Chi
Noname manuscript No. (will be inserted by the editor) An Integration of Bottom-up and Top-Down Salient Cues on RGB-D Data: Saliency from Objectness vs. Non-Objectness Nevrez Imamoglu Wataru Shimoda Chi
The Impact of Visual Saliency Prediction in Image Classification
 Dublin City University Insight Centre for Data Analytics Universitat Politecnica de Catalunya Escola Tècnica Superior d Enginyeria de Telecomunicacions de Barcelona Eric Arazo Sánchez The Impact of Visual
Dublin City University Insight Centre for Data Analytics Universitat Politecnica de Catalunya Escola Tècnica Superior d Enginyeria de Telecomunicacions de Barcelona Eric Arazo Sánchez The Impact of Visual
Weakly Supervised Coupled Networks for Visual Sentiment Analysis
 Weakly Supervised Coupled Networks for Visual Sentiment Analysis Jufeng Yang, Dongyu She,Yu-KunLai,PaulL.Rosin, Ming-Hsuan Yang College of Computer and Control Engineering, Nankai University, Tianjin,
Weakly Supervised Coupled Networks for Visual Sentiment Analysis Jufeng Yang, Dongyu She,Yu-KunLai,PaulL.Rosin, Ming-Hsuan Yang College of Computer and Control Engineering, Nankai University, Tianjin,
Recurrent Refinement for Visual Saliency Estimation in Surveillance Scenarios
 2012 Ninth Conference on Computer and Robot Vision Recurrent Refinement for Visual Saliency Estimation in Surveillance Scenarios Neil D. B. Bruce*, Xun Shi*, and John K. Tsotsos Department of Computer
2012 Ninth Conference on Computer and Robot Vision Recurrent Refinement for Visual Saliency Estimation in Surveillance Scenarios Neil D. B. Bruce*, Xun Shi*, and John K. Tsotsos Department of Computer
Attentional Masking for Pre-trained Deep Networks
 Attentional Masking for Pre-trained Deep Networks IROS 2017 Marcus Wallenberg and Per-Erik Forssén Computer Vision Laboratory Department of Electrical Engineering Linköping University 2014 2017 Per-Erik
Attentional Masking for Pre-trained Deep Networks IROS 2017 Marcus Wallenberg and Per-Erik Forssén Computer Vision Laboratory Department of Electrical Engineering Linköping University 2014 2017 Per-Erik
The Nottingham eprints service makes this work by researchers of the University of Nottingham available open access under the following conditions.
 Bulat, Adrian and Tzimiropoulos, Georgios (2016) Human pose estimation via convolutional part heatmap regression. In: 14th European Conference on Computer Vision (EECV 2016), 8-16 October 2016, Amsterdam,
Bulat, Adrian and Tzimiropoulos, Georgios (2016) Human pose estimation via convolutional part heatmap regression. In: 14th European Conference on Computer Vision (EECV 2016), 8-16 October 2016, Amsterdam,
arxiv: v1 [cs.cv] 17 Aug 2017
![arxiv: v1 [cs.cv] 17 Aug 2017](/thumbs/78/78278805.jpg "arxiv: v1 [cs.cv] 17 Aug 2017") Deep Learning for Medical Image Analysis Mina Rezaei, Haojin Yang, Christoph Meinel Hasso Plattner Institute, Prof.Dr.Helmert-Strae 2-3, 14482 Potsdam, Germany {mina.rezaei,haojin.yang,christoph.meinel}@hpi.de
Deep Learning for Medical Image Analysis Mina Rezaei, Haojin Yang, Christoph Meinel Hasso Plattner Institute, Prof.Dr.Helmert-Strae 2-3, 14482 Potsdam, Germany {mina.rezaei,haojin.yang,christoph.meinel}@hpi.de
arxiv: v1 [cs.cv] 1 Aug 2018
![arxiv: v1 [cs.cv] 1 Aug 2018](/thumbs/93/113443481.jpg "arxiv: v1 [cs.cv] 1 Aug 2018") arxiv:88.257v [cs.cv] Aug 8 Subitizing with Variational Autoencoders Rijnder Wever, Tom F.H. Runia University of Amsterdam, Intelligent Sensory Information Systems Abstract. Numerosity, the number of objects
arxiv:88.257v [cs.cv] Aug 8 Subitizing with Variational Autoencoders Rijnder Wever, Tom F.H. Runia University of Amsterdam, Intelligent Sensory Information Systems Abstract. Numerosity, the number of objects
Motivation: Attention: Focusing on specific parts of the input. Inspired by neuroscience.
 Outline: Motivation. What s the attention mechanism? Soft attention vs. Hard attention. Attention in Machine translation. Attention in Image captioning. State-of-the-art. 1 Motivation: Attention: Focusing
Outline: Motivation. What s the attention mechanism? Soft attention vs. Hard attention. Attention in Machine translation. Attention in Image captioning. State-of-the-art. 1 Motivation: Attention: Focusing
Quantifying Radiographic Knee Osteoarthritis Severity using Deep Convolutional Neural Networks
 Quantifying Radiographic Knee Osteoarthritis Severity using Deep Convolutional Neural Networks Joseph Antony, Kevin McGuinness, Noel E O Connor, Kieran Moran Insight Centre for Data Analytics, Dublin City
Quantifying Radiographic Knee Osteoarthritis Severity using Deep Convolutional Neural Networks Joseph Antony, Kevin McGuinness, Noel E O Connor, Kieran Moran Insight Centre for Data Analytics, Dublin City
Lateral Inhibition-Inspired Convolutional Neural Network for Visual Attention and Saliency Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Lateral Inhibition-Inspired Convolutional Neural Network for Visual Attention and Saliency Detection Chunshui Cao, 1,2 Yongzhen Huang,
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Lateral Inhibition-Inspired Convolutional Neural Network for Visual Attention and Saliency Detection Chunshui Cao, 1,2 Yongzhen Huang,
Revisiting RCNN: On Awakening the Classification Power of Faster RCNN
 Revisiting RCNN: On Awakening the Classification Power of Faster RCNN Bowen Cheng 1, Yunchao Wei 1, Honghui Shi 2, Rogerio Feris 2, Jinjun Xiong 2, and Thomas Huang 1 1 University of Illinois at Urbana-Champaign,
Revisiting RCNN: On Awakening the Classification Power of Faster RCNN Bowen Cheng 1, Yunchao Wei 1, Honghui Shi 2, Rogerio Feris 2, Jinjun Xiong 2, and Thomas Huang 1 1 University of Illinois at Urbana-Champaign,
Deep Unsupervised Saliency Detection: A Multiple Noisy Labeling Perspective
 Deep Unsupervised Saliency Detection: A Multiple Noisy Labeling Perspective Jing Zhang 1,2, Tong Zhang 2,3, Yuchao Dai 1, Mehrtash Harandi 2,3, and Richard Hartley 2 1 Northwestern Polytechnical University,
Deep Unsupervised Saliency Detection: A Multiple Noisy Labeling Perspective Jing Zhang 1,2, Tong Zhang 2,3, Yuchao Dai 1, Mehrtash Harandi 2,3, and Richard Hartley 2 1 Northwestern Polytechnical University,
Highly Accurate Brain Stroke Diagnostic System and Generative Lesion Model. Junghwan Cho, Ph.D. CAIDE Systems, Inc. Deep Learning R&D Team
 Highly Accurate Brain Stroke Diagnostic System and Generative Lesion Model Junghwan Cho, Ph.D. CAIDE Systems, Inc. Deep Learning R&D Team Established in September, 2016 at 110 Canal st. Lowell, MA 01852,
Highly Accurate Brain Stroke Diagnostic System and Generative Lesion Model Junghwan Cho, Ph.D. CAIDE Systems, Inc. Deep Learning R&D Team Established in September, 2016 at 110 Canal st. Lowell, MA 01852,
Validating the Visual Saliency Model
 Validating the Visual Saliency Model Ali Alsam and Puneet Sharma Department of Informatics & e-learning (AITeL), Sør-Trøndelag University College (HiST), Trondheim, Norway er.puneetsharma@gmail.com Abstract.
Validating the Visual Saliency Model Ali Alsam and Puneet Sharma Department of Informatics & e-learning (AITeL), Sør-Trøndelag University College (HiST), Trondheim, Norway er.puneetsharma@gmail.com Abstract.
Automatic Detection of Knee Joints and Quantification of Knee Osteoarthritis Severity using Convolutional Neural Networks
 Automatic Detection of Knee Joints and Quantification of Knee Osteoarthritis Severity using Convolutional Neural Networks Joseph Antony 1, Kevin McGuinness 1, Kieran Moran 1,2 and Noel E O Connor 1 Insight
Automatic Detection of Knee Joints and Quantification of Knee Osteoarthritis Severity using Convolutional Neural Networks Joseph Antony 1, Kevin McGuinness 1, Kieran Moran 1,2 and Noel E O Connor 1 Insight
Age Estimation based on Multi-Region Convolutional Neural Network
 Age Estimation based on Multi-Region Convolutional Neural Network Ting Liu, Jun Wan, Tingzhao Yu, Zhen Lei, and Stan Z. Li 1 Center for Biometrics and Security Research & National Laboratory of Pattern
Age Estimation based on Multi-Region Convolutional Neural Network Ting Liu, Jun Wan, Tingzhao Yu, Zhen Lei, and Stan Z. Li 1 Center for Biometrics and Security Research & National Laboratory of Pattern
Discovery of Rare Phenotypes in Cellular Images Using Weakly Supervised Deep Learning
 Discovery of Rare Phenotypes in Cellular Images Using Weakly Supervised Deep Learning Heba Sailem *1, Mar Arias Garcia 2, Chris Bakal 2, Andrew Zisserman 1, and Jens Rittscher 1 1 Department of Engineering
Discovery of Rare Phenotypes in Cellular Images Using Weakly Supervised Deep Learning Heba Sailem *1, Mar Arias Garcia 2, Chris Bakal 2, Andrew Zisserman 1, and Jens Rittscher 1 1 Department of Engineering
Learning a Discriminative Filter Bank within a CNN for Fine-grained Recognition
 Learning a Discriminative Filter Bank within a CNN for Fine-grained Recognition Yaming Wang 1, Vlad I. Morariu 2, Larry S. Davis 1 1 University of Maryland, College Park 2 Adobe Research {wym, lsd}@umiacs.umd.edu
Learning a Discriminative Filter Bank within a CNN for Fine-grained Recognition Yaming Wang 1, Vlad I. Morariu 2, Larry S. Davis 1 1 University of Maryland, College Park 2 Adobe Research {wym, lsd}@umiacs.umd.edu
An Integrated Model for Effective Saliency Prediction
 Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) An Integrated Model for Effective Saliency Prediction Xiaoshuai Sun, 1,2 Zi Huang, 1 Hongzhi Yin, 1 Heng Tao Shen 1,3
Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) An Integrated Model for Effective Saliency Prediction Xiaoshuai Sun, 1,2 Zi Huang, 1 Hongzhi Yin, 1 Heng Tao Shen 1,3
arxiv: v2 [cs.cv] 22 Sep 2015
![arxiv: v2 [cs.cv] 22 Sep 2015](/thumbs/84/90861766.jpg "arxiv: v2 [cs.cv] 22 Sep 2015") Robust Optimization for Deep Regression Vasileios Belagiannis 1,, Christian Rupprecht 1,, Gustavo Carneiro, and Nassir Navab 1, arxiv:10.00v [cs.cv] Sep 01 1 Computer Aided Medical Procedures, Technische
Robust Optimization for Deep Regression Vasileios Belagiannis 1,, Christian Rupprecht 1,, Gustavo Carneiro, and Nassir Navab 1, arxiv:10.00v [cs.cv] Sep 01 1 Computer Aided Medical Procedures, Technische
Image-Based Estimation of Real Food Size for Accurate Food Calorie Estimation
 Image-Based Estimation of Real Food Size for Accurate Food Calorie Estimation Takumi Ege, Yoshikazu Ando, Ryosuke Tanno, Wataru Shimoda and Keiji Yanai Department of Informatics, The University of Electro-Communications,
Image-Based Estimation of Real Food Size for Accurate Food Calorie Estimation Takumi Ege, Yoshikazu Ando, Ryosuke Tanno, Wataru Shimoda and Keiji Yanai Department of Informatics, The University of Electro-Communications,
Detection of suspicious lesion based on Multiresolution Analysis using windowing and adaptive thresholding method.
 Detection of suspicious lesion based on Multiresolution Analysis using windowing and adaptive thresholding method. Ms. N. S. Pande Assistant Professor, Department of Computer Science and Engineering,MGM
Detection of suspicious lesion based on Multiresolution Analysis using windowing and adaptive thresholding method. Ms. N. S. Pande Assistant Professor, Department of Computer Science and Engineering,MGM
Flexible, High Performance Convolutional Neural Networks for Image Classification
 Flexible, High Performance Convolutional Neural Networks for Image Classification Dan C. Cireşan, Ueli Meier, Jonathan Masci, Luca M. Gambardella, Jürgen Schmidhuber IDSIA, USI and SUPSI Manno-Lugano,
Flexible, High Performance Convolutional Neural Networks for Image Classification Dan C. Cireşan, Ueli Meier, Jonathan Masci, Luca M. Gambardella, Jürgen Schmidhuber IDSIA, USI and SUPSI Manno-Lugano,
Research Article Multiscale CNNs for Brain Tumor Segmentation and Diagnosis
 Computational and Mathematical Methods in Medicine Volume 2016, Article ID 8356294, 7 pages http://dx.doi.org/10.1155/2016/8356294 Research Article Multiscale CNNs for Brain Tumor Segmentation and Diagnosis
Computational and Mathematical Methods in Medicine Volume 2016, Article ID 8356294, 7 pages http://dx.doi.org/10.1155/2016/8356294 Research Article Multiscale CNNs for Brain Tumor Segmentation and Diagnosis
arxiv: v1 [cs.cv] 25 Jan 2018
![arxiv: v1 [cs.cv] 25 Jan 2018](/thumbs/74/70727868.jpg "arxiv: v1 [cs.cv] 25 Jan 2018") 1 Convolutional Invasion and Expansion Networks for Tumor Growth Prediction Ling Zhang, Le Lu, Senior Member, IEEE, Ronald M. Summers, Electron Kebebew, and Jianhua Yao arxiv:1801.08468v1 [cs.cv] 25 Jan
1 Convolutional Invasion and Expansion Networks for Tumor Growth Prediction Ling Zhang, Le Lu, Senior Member, IEEE, Ronald M. Summers, Electron Kebebew, and Jianhua Yao arxiv:1801.08468v1 [cs.cv] 25 Jan
Efficient Salient Region Detection with Soft Image Abstraction
 Efficient Salient Region Detection with Soft Image Abstraction Ming-Ming Cheng Jonathan Warrell Wen-Yan Lin Shuai Zheng Vibhav Vineet Nigel Crook Vision Group, Oxford Brookes University Abstract Detecting
Efficient Salient Region Detection with Soft Image Abstraction Ming-Ming Cheng Jonathan Warrell Wen-Yan Lin Shuai Zheng Vibhav Vineet Nigel Crook Vision Group, Oxford Brookes University Abstract Detecting
GESTALT SALIENCY: SALIENT REGION DETECTION BASED ON GESTALT PRINCIPLES
 GESTALT SALIENCY: SALIENT REGION DETECTION BASED ON GESTALT PRINCIPLES Jie Wu and Liqing Zhang MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems Dept. of CSE, Shanghai Jiao Tong
GESTALT SALIENCY: SALIENT REGION DETECTION BASED ON GESTALT PRINCIPLES Jie Wu and Liqing Zhang MOE-Microsoft Laboratory for Intelligent Computing and Intelligent Systems Dept. of CSE, Shanghai Jiao Tong
SalGAN: Visual Saliency Prediction with Generative Adversarial Networks
 SalGAN: Visual Saliency Prediction with Generative Adversarial Networks Junting Pan, Elisa Sayrol and Xavier Giro-i-Nieto Image Processing Group Universitat Politecnica de Catalunya (UPC) Barcelona, Catalonia/Spain
SalGAN: Visual Saliency Prediction with Generative Adversarial Networks Junting Pan, Elisa Sayrol and Xavier Giro-i-Nieto Image Processing Group Universitat Politecnica de Catalunya (UPC) Barcelona, Catalonia/Spain
DeepMiner: Discovering Interpretable Representations for Mammogram Classification and Explanation
 DeepMiner: Discovering Interpretable Representations for Mammogram Classification and Explanation Jimmy Wu 1, Bolei Zhou 1, Diondra Peck 2, Scott Hsieh 3, Vandana Dialani, MD 4 Lester Mackey 5, and Genevieve
DeepMiner: Discovering Interpretable Representations for Mammogram Classification and Explanation Jimmy Wu 1, Bolei Zhou 1, Diondra Peck 2, Scott Hsieh 3, Vandana Dialani, MD 4 Lester Mackey 5, and Genevieve
Action Recognition. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Action Recognition Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem This section: advanced topics Convolutional neural networks in vision Action recognition Vision and Language 3D
Action Recognition Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem This section: advanced topics Convolutional neural networks in vision Action recognition Vision and Language 3D
Deep Supervision for Pancreatic Cyst Segmentation in Abdominal CT Scans
 Deep Supervision for Pancreatic Cyst Segmentation in Abdominal CT Scans Yuyin Zhou 1, Lingxi Xie 2( ), Elliot K. Fishman 3, Alan L. Yuille 4 1,2,4 The Johns Hopkins University, Baltimore, MD 21218, USA
Deep Supervision for Pancreatic Cyst Segmentation in Abdominal CT Scans Yuyin Zhou 1, Lingxi Xie 2( ), Elliot K. Fishman 3, Alan L. Yuille 4 1,2,4 The Johns Hopkins University, Baltimore, MD 21218, USA
Automated diagnosis of pneumothorax using an ensemble of convolutional neural networks with multi-sized chest radiography images
 Automated diagnosis of pneumothorax using an ensemble of convolutional neural networks with multi-sized chest radiography images Tae Joon Jun, Dohyeun Kim, and Daeyoung Kim School of Computing, KAIST,
Automated diagnosis of pneumothorax using an ensemble of convolutional neural networks with multi-sized chest radiography images Tae Joon Jun, Dohyeun Kim, and Daeyoung Kim School of Computing, KAIST,
3D Deep Learning for Multi-modal Imaging-Guided Survival Time Prediction of Brain Tumor Patients
 3D Deep Learning for Multi-modal Imaging-Guided Survival Time Prediction of Brain Tumor Patients Dong Nie 1,2, Han Zhang 1, Ehsan Adeli 1, Luyan Liu 1, and Dinggang Shen 1(B) 1 Department of Radiology
3D Deep Learning for Multi-modal Imaging-Guided Survival Time Prediction of Brain Tumor Patients Dong Nie 1,2, Han Zhang 1, Ehsan Adeli 1, Luyan Liu 1, and Dinggang Shen 1(B) 1 Department of Radiology
THE human visual system has the ability to zero-in rapidly onto
 1 Weakly Supervised Top-down Salient Object Detection Hisham Cholakkal, Jubin Johnson, and Deepu Rajan arxiv:1611.05345v2 [cs.cv] 17 Nov 2016 Abstract Top-down saliency models produce a probability map
1 Weakly Supervised Top-down Salient Object Detection Hisham Cholakkal, Jubin Johnson, and Deepu Rajan arxiv:1611.05345v2 [cs.cv] 17 Nov 2016 Abstract Top-down saliency models produce a probability map
Where should saliency models look next?
 Where should saliency models look next? Zoya Bylinskii 1, Adrià Recasens 1, Ali Borji 2, Aude Oliva 1, Antonio Torralba 1, and Frédo Durand 1 1 Computer Science and Artificial Intelligence Laboratory Massachusetts
Where should saliency models look next? Zoya Bylinskii 1, Adrià Recasens 1, Ali Borji 2, Aude Oliva 1, Antonio Torralba 1, and Frédo Durand 1 1 Computer Science and Artificial Intelligence Laboratory Massachusetts
SALIENCY refers to a component (object, pixel, person) in a
 in a") 1 Personalized Saliency and Its Prediction Yanyu Xu *, Shenghua Gao *, Junru Wu *, Nianyi Li, and Jingyi Yu arxiv:1710.03011v2 [cs.cv] 16 Jun 2018 Abstract Nearly all existing visual saliency models by
1 Personalized Saliency and Its Prediction Yanyu Xu *, Shenghua Gao *, Junru Wu *, Nianyi Li, and Jingyi Yu arxiv:1710.03011v2 [cs.cv] 16 Jun 2018 Abstract Nearly all existing visual saliency models by
arxiv: v1 [cs.cv] 3 Sep 2018
![arxiv: v1 [cs.cv] 3 Sep 2018](/thumbs/85/91733898.jpg "arxiv: v1 [cs.cv] 3 Sep 2018") Learning Saliency Prediction From Sparse Fixation Pixel Map Shanghua Xiao Department of Computer Science, Sichuan University, Sichuan Province, China arxiv:1809.00644v1 [cs.cv] 3 Sep 2018 2015223040036@stu.scu.edu.cn
Learning Saliency Prediction From Sparse Fixation Pixel Map Shanghua Xiao Department of Computer Science, Sichuan University, Sichuan Province, China arxiv:1809.00644v1 [cs.cv] 3 Sep 2018 2015223040036@stu.scu.edu.cn
Skin cancer reorganization and classification with deep neural network
 Skin cancer reorganization and classification with deep neural network Hao Chang 1 1. Department of Genetics, Yale University School of Medicine 2. Email: changhao86@gmail.com Abstract As one kind of skin
Skin cancer reorganization and classification with deep neural network Hao Chang 1 1. Department of Genetics, Yale University School of Medicine 2. Email: changhao86@gmail.com Abstract As one kind of skin
CS-E Deep Learning Session 4: Convolutional Networks
 CS-E4050 - Deep Learning Session 4: Convolutional Networks Jyri Kivinen Aalto University 23 September 2015 Credits: Thanks to Tapani Raiko for slides material. CS-E4050 - Deep Learning Session 4: Convolutional
CS-E4050 - Deep Learning Session 4: Convolutional Networks Jyri Kivinen Aalto University 23 September 2015 Credits: Thanks to Tapani Raiko for slides material. CS-E4050 - Deep Learning Session 4: Convolutional