Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
|
|
|
- Rudolf Franklin Ryan
- 6 years ago
- Views:
Transcription
1 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2
2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types 2
3 Agents An agent is anything that can be viewed as Sensors: perceive environment Actuators: act upon environment Samples of agents 3 Human agent Sensors: eyes, ears, and other organs for sensors Actuators: hands, legs, vocal tract, and other movable or changeable body parts Robotic agent Sensors: cameras and infrared range finders Actuators: various motors Software agents Sensors: keystrokes, file contents, received network packages Actuators: displays on the screen, files, sent network packets
4 Agents & environments Agent behavior can be described as an agent function that maps entire perception histories to actions: f: P A Percept sequence to date Action set The agent program runs on the physical architecture to produce f Program is a concrete implementation of agent function Architecture includes sensors, actuators, computing device agent = architecture + program 4
5 Vacuum-cleaner world Percepts: location and dirt/clean status of its location e.g., [A,Dirty] Actions: Left, Right, Suck, NoOp 5
6 A vacuum-cleaner agent Tabulation of the agent function Percept Sequence [A, Clean] [A, Dirty] [B, Clean] Action Right Suck Left [ B, Dirty] Suck [A, Clean], [A, Clean] [A, Clean], [A, Dirty] Right Suck One simple rule implementing the agent function: If the current square is dirty then suck, otherwise move to the other square 6 [A, Clean], [A, Clean], [A, Clean] [A, Clean], [A, Clean], [A, Dirty] Right Suck
7 Rational agents "do the right thing" based on the perception history and the actions it can perform. Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has. 7
8 Performance measure Evaluates the sequence of environment states Vacuum-cleaner agent: samples of performance measure Amount of dirt cleaned up One point award for each clean square at each time step Penalty for electricity consumption & generated noise Mediocre job or periods of high and low activation? 8
9 Rational agents (vacuum cleaner example) Is this rational? If dirty then suck, otherwise move to the other square Depends on Performance measure, e.g., Penalty for energy consumption? Environment, e.g., New dirt can appear? Actuators, e.g., No-op action? Sensors, e.g., Only sense dirt in its location? 9
10 Rationality vs. Omniscience Rationality is distinct from omniscience (all-knowing with infinite knowledge, impossible in reality) Doing actions in order to modify future percepts to obtain useful information information gathering or exploration (important for rationality) e.g., eyeballs and/or neck movement in human to see different directions 10

11 Autonomy An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) Not just relies only on prior knowledge of designer Learns to compensate for partial or incorrect prior knowledge Benefit: changing environment Starts by acting randomly or base on designer knowledge and then learns form experience Rational agent should be autonomous Example: vacuum-cleaner agent If dirty then suck, otherwise move to the other square Does it yield an autonomous agent? learning to foresee occurrence of dirt in squares 11
12 Task Environment (PEAS) Performance measure Environment Actuators Sensors 12

13 PEAS Samples Agent:Automated taxi driver Performance measure: Safe, fast, legal, comfortable trip, maximize profits, Environment: Roads, other traffic, pedestrians, customers, Actuators: Steering wheel, accelerator, brake, signal, horn, display Sensors: Cameras, sonar, speedometer, GPS, odometer, accelerometer, engine sensors, keyboard 13
14 PEAS Samples Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers) 14
15 PEAS Samples Satellite image analysis system Performance measure: Correct image categorization Environment: Downlink from orbiting satellite Actuators: Display of scene categorization Sensors: Color pixel array 15


16 PEAS Samples Agent: Part picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors 16
17 PEAS Samples Agent: Interactive English tutor Performance measure: Maximize student's score on test Environment: Set of students Actuators: Screen display (exercises, suggestions, corrections) Sensors: Keyboard 17
18 PEAS Samples Agent: Pacman Performance measure: Score, lives Environment: Maze containing white dots, four ghosts, power pills, occasionally appearing fruit Actuators:Arrow keys Sensors: Game screen 18
: Sensors give access to the complete state of the environment at each time Sensors detect all aspects relevant to the choice of action Convenient")
19 Environment types Fully observable (vs. partially observable): Sensors give access to the complete state of the environment at each time Sensors detect all aspects relevant to the choice of action Convenient (need not any internal state) Noisy and inaccurate sensors or missing parts of the state from sensors cause partially observability 19
20 Environment types Deterministic (vs. stochastic): Next state can be completely determined by the current state and the executed action If the environment is deterministic except for the actions of other agents, then the environment is strategic (we ignore this uncertainty) Partially observable environment could appear to be stochastic. Environment is uncertain if it is not fully observable or not deterministic 20
21 Environment types Single agent (vs. multi-agent): Crossword puzzle is a single-agent game (chess is a multi-agent one) Is B an agent or just an object in the environment? B is an agent when its behavior can be described as maximizing a performance measure whose value depends on A s behavior. Multi-agent: competitive, cooperative Randomized behavior and communication can be rational Discrete (vs. continuous): A limited number of distinct, clearly defined states, percepts and actions, time steps Chess has finite number of discrete states, and discrete set of percepts and actions while Taxi driving has continuous states, and actions 21
22 Environment types Episodic (vs. sequential): The agent's experience is divided into atomic "episodes where the choice of action in each episode depends only on the episode itself. E.g., spotting defective parts on an assembly line (independency) In sequential environments, short-term actions can have long-term consequences Episodic environment can be much simpler Static (vs. dynamic): The environment is unchanged while an agent is deliberating. Semi-dynamic: if the environment itself does not change with the passage of time but the agent's performance score does. Static (cross-word puzzles), dynamic (taxi driver), semi-dynamic (clock chess) 22
23 Environment types Known (vs. unknown): the outcomes or (outcomes probabilities for all actions are given. It is not strictly a property of the environment Related to agent s or designer s state of knowledge about laws of physics of the environment The real world is partially observable, multi-agent, stochastic, sequential, dynamic, continuous, (and unknown) Hardest type of environment The environment type largely determines the agent design 23

24 Pacman game Fully observable? Single-agent? Deterministic? Discrete? Episodic? Static? Known? 24
25 Environment types 25
26 Environment types 26
27 Structure of agents An agent is completely specified by the agent function (that maps percept sequences to actions) One agent function or small equivalent class is rational Agent program implements agent function (focus of our course) Agent program takes just the current percept as input Agent needs to remember the whole percept sequence, if requiring it (internal state) 27
28 Agent Program Types Lookup table Basic types of agent program in order of increasing generality: Simple reflexive Model-based reflex agents Goal-based agents We mainly focus on this type in our course Utility-based agents Learning-based agents 28
29 Look Up Table Agents Benefits: Easy to implement Drawbacks: T space ( t=1 P t ; P : set of possible percepts, T: lifetime) For chess at least entries while less than atoms in the observable universe the designer have not time to create table no agent could ever learn the right table entries from its experience how to fill in table entries? 29
30 Agent program Mapping is not necessarily using a table. AI intends to find programs producing rational behavior (to the extent possible) from a smallish program instead of a vast table Can AI do for general intelligent behavior what Newton did for square roots? Huge tables of square roots before 1970s function SQRT( double X ) { double r = 1.0 ; while ( fabs( r * r - x ) > 10-8 ) r = r - ( r * r - x ) / 2r ; return r ; } 30

31 Simple Reflex Agents Agent Program 31
32 Simple Reflex Agents Select actions on the basis of the current percept ignoring the rest of the percept history If car-in-front-is-braking then initiate-braking Blinking reflex 32
33 Simple Reflex Agents Simple, but very limited intelligence Works only if the correct decision can be made on the basis of the current percept (fully observability) Infinite loops in partially observable environment 33
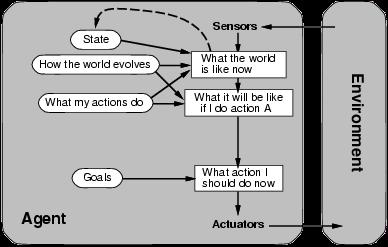
34 34 Model-based reflex agents
35 Model-based reflex agents Partial observability Internal state (based on percept history) reflects some unobserved aspects of the current state Updating the internal state information requires two kinds of knowledge Information about how the world evolves (independent of agent) Information about how the agent's own actions affects the world Only determine the best guess for the current state of a partially observable environment 35
36 Goal-based agents 36
37 Goal-based agents Knowing about the current state is not always enough to decide what to do Situations that are desirable must be specified (goal) Usually requires search and planning to find action sequences achieving goal 37
38 Goal-based agents vs. reflex-based agents Consideration of future Goal-based agents may be less efficient but are more flexible Knowledge is represented explicitly and can be changed easily Example: going to a new destination Goal-based agent: specifying that destination as the goal Reflexive agent: agent's rules for when to turn and when to go straight must be rewritten 38
39 Utility-based agents 39
40 Utility-based agents More general performance measure than goals How happy would each world state make the agent? Utility function is an internalization of performance measure Advantages Like goal-based agents show flexibility and learning advantages Can trade-off conflicting goals (e.g. speed and safety) Where none of several goals can be achieved with certainty likelihood of success can be weighted by importance of goals Rational utility-based agent chooses the action that maximizes the expected utility of action outcomes Many chapters of AIMA book is about this Handling uncertainty in partially observable and stochastic environments 40

41 Learning Agents 41
42 Learning Agents Create state-of-the-art systems in many areas of AI Four conceptual components Performance element: selects actions based on percepts (considered as entire agent before) Learning element: makes improvements by modifying knowledge (performance element) based on critic feedback Critic: feedbacks on how the agents is doing Problem generator: suggests actions leading to new and informative experiences Performance standard Fixed, out of the agent Percepts themselves do not provide indication of success Distinguishes part of the incoming percept as a reward or penalty 42
43 Learning Agents Learning element is based on performance element (i.e., agent design) The learning element can make changes to any of the "knowledge" components of previous agent diagrams To bring components into closer agreement with feedback (yielding better overall performance) 43
Intelligent Agents. Outline. Agents. Agents and environments
 Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents. BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University. Slides are mostly adapted from AIMA
 1 Intelligent Agents BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
1 Intelligent Agents BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
22c:145 Artificial Intelligence
 22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
Outline for Chapter 2. Agents. Agents. Agents and environments. Vacuum- cleaner world. A vacuum- cleaner agent 8/27/15
 Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
AI: Intelligent Agents. Chapter 2
 AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
Outline. Chapter 2 Agents & Environments. Agents. Types of Agents: Immobots
 Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Artificial Intelligence Agents and Environments 1
 Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
CS 331: Artificial Intelligence Intelligent Agents. Agent-Related Terms. Question du Jour. Rationality. General Properties of AI Systems
 General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
Intelligent Agents. CmpE 540 Principles of Artificial Intelligence
 CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Lecture 2 Agents & Environments (Chap. 2) Outline
 Outline") Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Agents. This course is about designing intelligent agents Agents and environments. Rationality. The vacuum-cleaner world
 This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Rational Agents (Chapter 2)
") Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Intelligent Agents. Russell and Norvig: Chapter 2
 Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Agents. Environments Multi-agent systems. January 18th, Agents
 Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Artificial Intelligence Intelligent agents
 Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
Intelligent Agents. Chapter 2
 Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
What is AI? The science of making machines that: Think rationally. Think like people. Act like people. Act rationally
 What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
Agents and State Spaces. CSCI 446: Artificial Intelligence
 Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents. Formalizing Task Environments. What s an agent? The agent and the environment. Environments. Example: the automated taxi driver (PEAS)
") What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Agents and Environments. Stephen G. Ware CSCI 4525 / 5525
 Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
KECERDASAN BUATAN 3. By Sirait. Hasanuddin Sirait, MT
 KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
CS324-Artificial Intelligence
 CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Ar#ficial Intelligence
 Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Agents and Environments
 Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Agents and State Spaces. CSCI 446: Ar*ficial Intelligence Keith Vertanen
 Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
AI Programming CS F-04 Agent Oriented Programming
 AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
Solutions for Chapter 2 Intelligent Agents
 Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Agents. Robert Platt Northeastern University. Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS Seif El-Nasr, CS4100
 Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Silvia Rossi. Agent as Intentional Systems. Lezione n. Corso di Laurea: Informatica. Insegnamento: Sistemi multi-agente.
 Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
What is AI? The science of making machines that:
 What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
Artificial Intelligence. Admin.
 15-381 Artificial Intelligence Admin. Instructor: Martial Hebert, NSH 4101, x8-2585 Textbook: Recommended (optional) textbook: Russell and Norvig's "Artificial Intelligence: A Modern Approach (2 nd edition)
15-381 Artificial Intelligence Admin. Instructor: Martial Hebert, NSH 4101, x8-2585 Textbook: Recommended (optional) textbook: Russell and Norvig's "Artificial Intelligence: A Modern Approach (2 nd edition)
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE
 GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
Definitions. The science of making machines that: This slide deck courtesy of Dan Klein at UC Berkeley
 Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS
 1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Katsunari Shibata and Tomohiko Kawano
 Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
Four Example Application Domains
 Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Artificial Intelligence. Outline
 Artificial Intelligence Embodied Intelligence (R. Brooks, MIT) Outline Key perspectives for thinking about how an intelligent system interacts with world Compare mainstream AI to early artificial creature
Artificial Intelligence Embodied Intelligence (R. Brooks, MIT) Outline Key perspectives for thinking about how an intelligent system interacts with world Compare mainstream AI to early artificial creature
A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning
 A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning Azam Rabiee Computer Science and Engineering Isfahan University, Isfahan, Iran azamrabiei@yahoo.com Nasser Ghasem-Aghaee Computer
A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning Azam Rabiee Computer Science and Engineering Isfahan University, Isfahan, Iran azamrabiei@yahoo.com Nasser Ghasem-Aghaee Computer
OPTIC FLOW IN DRIVING SIMULATORS
 OPTIC FLOW IN DRIVING SIMULATORS Ronald R. Mourant, Beverly K. Jaeger, and Yingzi Lin Virtual Environments Laboratory 334 Snell Engineering Center Northeastern University Boston, MA 02115-5000 In the case
OPTIC FLOW IN DRIVING SIMULATORS Ronald R. Mourant, Beverly K. Jaeger, and Yingzi Lin Virtual Environments Laboratory 334 Snell Engineering Center Northeastern University Boston, MA 02115-5000 In the case
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
GENERAL STATEMENT OF JOB. Specific Duties and Responsibilities
 GENERAL STATEMENT OF JOB Provide support services involving all aspects of crime scene investigations, including but not limited to, identification and processing of latent fingerprints, technical photography,
GENERAL STATEMENT OF JOB Provide support services involving all aspects of crime scene investigations, including but not limited to, identification and processing of latent fingerprints, technical photography,
Sequential Decision Making
 Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
Problem Solving Agents
 Problem Solving Agents CSL 302 ARTIFICIAL INTELLIGENCE SPRING 2014 Goal Based Agents Representation Mechanisms (propositional/first order/probabilistic logic) Learning Models Search (blind and informed)
Problem Solving Agents CSL 302 ARTIFICIAL INTELLIGENCE SPRING 2014 Goal Based Agents Representation Mechanisms (propositional/first order/probabilistic logic) Learning Models Search (blind and informed)
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Re: ENSC 370 Project Gerbil Functional Specifications
 Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
Robot Behavior Genghis, MIT Callisto, GATech
 Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Effects of Sequential Context on Judgments and Decisions in the Prisoner s Dilemma Game
 Effects of Sequential Context on Judgments and Decisions in the Prisoner s Dilemma Game Ivaylo Vlaev (ivaylo.vlaev@psy.ox.ac.uk) Department of Experimental Psychology, University of Oxford, Oxford, OX1
Effects of Sequential Context on Judgments and Decisions in the Prisoner s Dilemma Game Ivaylo Vlaev (ivaylo.vlaev@psy.ox.ac.uk) Department of Experimental Psychology, University of Oxford, Oxford, OX1
About Varibel. Varibel strives to improve the quality of life for everyone who comes in touch with our products.
 Focus on hearing About Varibel Though each of the five senses are of great importance, sight and the ability to detect and interpret sound are of the utmost essence to our everyday lives. It is Varibel
Focus on hearing About Varibel Though each of the five senses are of great importance, sight and the ability to detect and interpret sound are of the utmost essence to our everyday lives. It is Varibel
Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain
 Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain Welcome to the Z-Health Neuroscience Body Hacks Webinar! Because our webinar
Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain Welcome to the Z-Health Neuroscience Body Hacks Webinar! Because our webinar
AVR Based Gesture Vocalizer Using Speech Synthesizer IC
 AVR Based Gesture Vocalizer Using Speech Synthesizer IC Mr.M.V.N.R.P.kumar 1, Mr.Ashutosh Kumar 2, Ms. S.B.Arawandekar 3, Mr.A. A. Bhosale 4, Mr. R. L. Bhosale 5 Dept. Of E&TC, L.N.B.C.I.E.T. Raigaon,
AVR Based Gesture Vocalizer Using Speech Synthesizer IC Mr.M.V.N.R.P.kumar 1, Mr.Ashutosh Kumar 2, Ms. S.B.Arawandekar 3, Mr.A. A. Bhosale 4, Mr. R. L. Bhosale 5 Dept. Of E&TC, L.N.B.C.I.E.T. Raigaon,
Introduction to Arti Intelligence
 Introduction to Arti Intelligence cial Lecture 1: Foundations Prof. Gilles Louppe g.louppe@uliege.be 1 / 69 Today Course outline Introduction to Arti cial Intelligence Intelligent agents 2 / 69 Introduction
Introduction to Arti Intelligence cial Lecture 1: Foundations Prof. Gilles Louppe g.louppe@uliege.be 1 / 69 Today Course outline Introduction to Arti cial Intelligence Intelligent agents 2 / 69 Introduction
Speak Out! Sam Trychin, Ph.D. Copyright 1990, Revised Edition, Another Book in the Living With Hearing Loss series
 Speak Out! By Sam Trychin, Ph.D. Another Book in the Living With Hearing Loss series Copyright 1990, Revised Edition, 2004 Table of Contents Introduction...1 Target audience for this book... 2 Background
Speak Out! By Sam Trychin, Ph.D. Another Book in the Living With Hearing Loss series Copyright 1990, Revised Edition, 2004 Table of Contents Introduction...1 Target audience for this book... 2 Background
Affective Preference From Physiology in Videogames: a Lesson Learned from the TORCS Experiment
 Affective Preference From Physiology in Videogames: a Lesson Learned from the TORCS Experiment M. Garbarino, M. Matteucci, A. Bonarini garbarino@elet.polimi.it Dipartimento di Elettronica e Informazione,
Affective Preference From Physiology in Videogames: a Lesson Learned from the TORCS Experiment M. Garbarino, M. Matteucci, A. Bonarini garbarino@elet.polimi.it Dipartimento di Elettronica e Informazione,
Embodiment in GLAIR: A Grounded Layered Architecture. with Integrated Reasoning for Autonomous Agents. Henry Hexmoor. Johan Lammens.
 Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Introduction to Decision Making
 Introduction to Decision Making 1 Physical therapist assistants, or PTAs, are not physical therapy technicians. The term technician suggests someone who is expert in the technical aspects of a task. Technicians
Introduction to Decision Making 1 Physical therapist assistants, or PTAs, are not physical therapy technicians. The term technician suggests someone who is expert in the technical aspects of a task. Technicians
Solving problems by searching
 Solving problems by searching Chapter 3 14 Jan 2004 CS 3243 - Blind Search 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 14 Jan 2004 CS 3243
Solving problems by searching Chapter 3 14 Jan 2004 CS 3243 - Blind Search 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 14 Jan 2004 CS 3243
Ophthalmology. Chairs That Optimize Eye Exams and Eye Surgeries. Designed and manufactured in Denmark since 1935
 Ophthalmology Chairs That Optimize Eye Exams and Eye Surgeries Designed and manufactured in Denmark since 1935 VELA Move Ophthalmology Chair THE PUSH HANDLE MAKES IT EASY TO TRANSFER THE PATIENT BETWEEN
Ophthalmology Chairs That Optimize Eye Exams and Eye Surgeries Designed and manufactured in Denmark since 1935 VELA Move Ophthalmology Chair THE PUSH HANDLE MAKES IT EASY TO TRANSFER THE PATIENT BETWEEN
Protecting Workers with Smart E-Vests
 Protecting Workers with Smart E-Vests Kristen Hines kphines@vt.edu Wallace Lages Federal University of Minas Gerais Belo Horizonte, MG, Brazil wlages@vt.edu Namitha Somasundaram snamitta@vt.edu This is
Protecting Workers with Smart E-Vests Kristen Hines kphines@vt.edu Wallace Lages Federal University of Minas Gerais Belo Horizonte, MG, Brazil wlages@vt.edu Namitha Somasundaram snamitta@vt.edu This is
Perceptual Anchoring with Indefinite Descriptions
 Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Introduction to Deep Reinforcement Learning and Control
 Carnegie Mellon School of Computer Science Deep Reinforcement Learning and Control Introduction to Deep Reinforcement Learning and Control Lecture 1, CMU 10703 Katerina Fragkiadaki Logistics 3 assignments
Carnegie Mellon School of Computer Science Deep Reinforcement Learning and Control Introduction to Deep Reinforcement Learning and Control Lecture 1, CMU 10703 Katerina Fragkiadaki Logistics 3 assignments
Measuring the Impossible : Quantifying the Subjective (A method for developing a Risk Perception Scale applied to driving)
") Title Page 1 Measuring the Impossible : Quantifying the Subjective (A method for developing a Risk Perception Scale applied to driving) Hector MONTERDE i BORT (Monterde-Bort H.) Universitat de València
Title Page 1 Measuring the Impossible : Quantifying the Subjective (A method for developing a Risk Perception Scale applied to driving) Hector MONTERDE i BORT (Monterde-Bort H.) Universitat de València
Chapter 5 Car driving
 5 Car driving The present thesis addresses the topic of the failure to apprehend. In the previous chapters we discussed potential underlying mechanisms for the failure to apprehend, such as a failure to
5 Car driving The present thesis addresses the topic of the failure to apprehend. In the previous chapters we discussed potential underlying mechanisms for the failure to apprehend, such as a failure to
Achievement: Approach versus Avoidance Motivation
 LP 11E Achievement motivation 1 Achievement: Approach versus Avoidance Motivation Approach motivation: A motivation to experience positive outcomes Avoidance motivation: A motivation not to experience
LP 11E Achievement motivation 1 Achievement: Approach versus Avoidance Motivation Approach motivation: A motivation to experience positive outcomes Avoidance motivation: A motivation not to experience