Lecture 5- Hybrid Agents 2015/2016
|
|
|
- Henry Spencer
- 5 years ago
- Views:
Transcription

1 Lecture 5- Hybrid Agents 2015/2016 Ana Paiva * These slides are based on the book by Prof. M. Woodridge An Introduction to Multiagent Systems and the slides online compiled by Professor Jeffrey S. Rosenschein.. Modifications introduced by Prof. Ana Paiva, are her sole responsibility.
2 What is an Agent? Agent sensors actuators ENVIRONMENT The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their internal state Thus: an agent is a computer system capable of autonomous action in some environment in order to meet its design objectives
3 Limitations of Reactive Agents Agents without environment models must have sufficient information available from local environment If decisions are based on local environment, how does it take into account non-local information (i.e., it has a short-term view) Difficult to make reactive agents that learn Since behavior emerges from component interactions plus environment, it is hard to see how to engineer specific agents (no principled methodology exists) It is hard to engineer agents with large numbers of behaviors (dynamics of interactions become too complex to understand) 5-3

4 Criticisms to Deliberative Agents The symbolic approach The grounding to the real world Speed of decisions to deal with the real world.


5 Hybrid Architectures Many researchers have argued that neither a completely deliberative nor completely reactive approach is suitable for building agents They have suggested using hybrid systems, which attempt to marry classical and alternative approaches 5-5

6 Hybrid Architectures An obvious approach is to build an agent out of two (or more) subsystems: a deliberative one, containing a symbolic world model, which develops plans and makes decisions in the way proposed by symbolic AI a reactive one, which is capable of reacting to events without complex reasoning 6
7 Requirements for Hybrid Architectures Situated behaviour: agents need to respond to the events in the world in real time Goal oriented behaviour: agents need to select their actions taking into account the resources they have to achieve them and plan for how to achieve them. Efficiency: the tasks should be done in an efficient way, even with time constraints. Coordination: agents should be able to coordinate their activities with other agents.

8 Hybrid Architectures Often, the reactive component is given some kind of precedence over the deliberative one This kind of structuring leads naturally to the idea of a layered architecture. In such an architecture, an agent s control subsystems are arranged into a hierarchy, with higher layers dealing with information at increasing levels of abstraction 5-8

9 Hybrid Architectures A key problem in such architectures is what kind of control framework to embed the agent s subsystems in, to manage the interactions between the various layers. Horizontal layering Layers are each directly connected to the sensory input and action output. In effect, each layer itself acts like an agent, producing suggestions as to what action to perform. Vertical layering Sensory input and action output are each dealt with by at most one layer each 5-9

10 Hybrid Architectures: horizontal layering Each layer can be seen as one agent Advantages: simplicity Disadvantages: the global behaviour may not be coherent. difficult to build Layer n P input.. Layer 2 action Layer 1
11 Hybrid Architectures: vertical layering Vertical (1 pass control) Vertical (2 passes control) ) Action output Layer n Layer n Layer 2 Layer 2 Layer 1 Layer 1 Perceptual input Perceptual input Action output
12 Hybrid Architectures m possible actions suggested by each layer, n layers m n interactions Introduces bottleneck in central control system m 2 (n-1) interactions Not fault tolerant to layer failure 5-12
13 Ferguson- TOURING MACHINES 13

14 TOURINGMACHINES (Ferguson) The TOURINGMACHINES architecture consists of perception and action subsystems, which interface directly with the agent s environment, and three control layers, embedded in a control framework, which mediates between the layers 5-14
15 TOURINGMACHINES 5-15
16 TOURINGMACHINES The reactive layer is implemented as a set of situation-action rules, a la subsumption architecture Example: rule-1: kerb-avoidance if is-in-front(kerb, Observer) and speed(observer) > 0 and separation(kerb, Observer) < KerbThreshHold then change-orientation(kerbavoidanceangle) 5-16
17 TOURINGMACHINES The planning layer constructs plans and selects actions to execute in order to achieve the agent s goals (pro-active behaviour) Responsible for generating, executing and dynamically adapt the partial plans of the plan library. These plans aim at achieving tasks that the agent needs to execute on a long term basis. Plans are stored as partial hierarchical plans in a plan library. 5-17
18 TOURINGMACHINES The modeling layer contains symbolic representations of the cognitive state of other entities in the agent s environment It maintains a representation of the world through 4-tuples <C,B,D,I> indexed to a time stamp C- configuration: describes the place of the objects of the environment, velocity, acceleration, etc.; B- set of beliefs attributed to the entity; D- desires, represented through a list of goals and their priorities I- represented as an hierarchic plan that represents the intentional structure. 5-18
19 TOURINGMACHINES The three layers communicate with each other and are embedded in a control framework, which use control rules Control rules are defined by the programmer guaranteeing that: - At least one will fire in a given situation (bottleneck) - At least one action needs to remain in the action subsystem. 5-19
20 TOURINGMACHINES Control rules Example: censor-rule-1: if entity(obstacle-6) in perception-buffer then remove-sensory-record(layer-r, entity(obstacle-6)) 5-20
21 TOURINGMACHINES Suppressor: Conditional part: tests the existence of actions in the action submodule Action: operations to restrict that certain commands are executed by the action subsystem.. rule suppressor-rule-3 : if action-command(layer-r, rule-6, change-orientation()) in action-buffer and current-intention(start-overtake) then remove-action-command(layer-r, change-orientation()) and remove-action-command(layer-m, _). 5-21
22 Müller InteRRaP 22
 behavior layer world model (WIF) world interface perceptual input action output")
23 Müller InteRRaP Vertically layered, two-pass architecture (CC) cooperation layer social knowledge (PBC) plan layer planning knowledge (BBC) behavior layer world model (WIF) world interface perceptual input action output 5-23
 executes and controls the basic recative behaviour.")
24 InteRRaP- Components of the architecture WIF (World Interface) contains the perception facilities of the system, as well as the action and communication facilities. BBC- (Behaviour- Based Component) executes and controls the basic recative behaviour. This element of based on a set of patterns of behaviour PBC (Plan Based Component): this component contains the planning mechanism of the agent allowing for the agent to have local plans. KB (Knowledge Base)- is the internal structure that is organised in an hierarchical manner composed by 4 levels associated with the different control levels. CC (Cooperation Component): allows for the cooperation between agents
25 InteRRaP- Knowledge Base Cooperation Level: knowledge about the other agents, common goals and intentions, and shared plans. Local Plans Level knowledge about itself including plans, intentions and actions. World Model Level- raw information coming from the environment. This hierarchic division of the knowledge base contrasts InteRRaP and TOURINGMACHINES


26 InteRRaP-Behaviour Based Component (BBC) Goals To incorporate the reactive activities of the agent that allows it to deal with emergency situations and real time Provide the agent with procedural knowledge that will allow it to execute routine tasks..
27 InteRRaP-Behaviour Based Component (BBC) Patterns of Behaviour connect the perception to action Types: Reactors: these rules are activated by external events that cause the execution of an action by the agent (eg. Stop). Control modifiers- they extend the control of the planning system make a call to the PBC (eg. Treat_order) Knowledge modifiers- change the internal state of the agent and are activated by changes in the world detected by the agent. Procedures- execute actions specified by the planner.


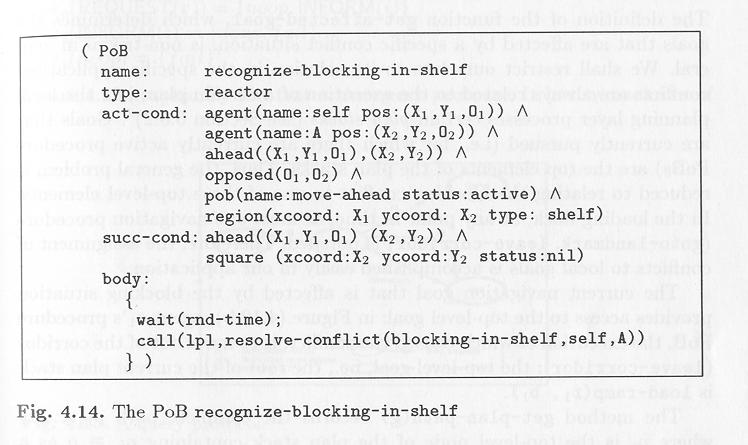
28 InteRRap: PoBs
29 InteRRap: Planning Component Includes the planning capabilities of the agent. Functions: (1) obtain a plan for a given goal (2) control the execution of that plan Components PBC-control- makes the interface with the BBC by receiving messages and sending messages to the other level. Plan-generator- generates plans through the selection of a set of plans from the plan library. Plan-evaluator- used for selecting the best generated plan.


30 InteRRap: Use of Plans of Behaviour (PoBs)

31 A summary 31


32 InteRRap: Interaction between layers Bottom-up activation: Perceptions start to be handled in the reactive layer. If this layer cannot handle it, the information goes up one layer to be handled. Top-down execution: Actions are sent from the top layers down to the bottom layers for execution.

33 InteRRap: Control
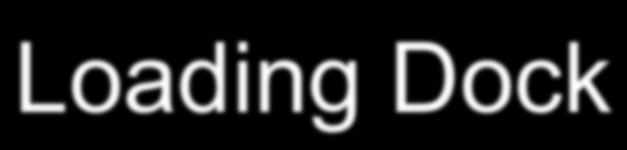
34 InteRRap: Application: the Loading Dock

35 InteRRap: Dealing with conflicts

36 Application: robots
37 Stanley 37
38 The DARPA Grand Challenge Launched by DARPA in 2003 Goal: Develop an autonomous robot capable of traversing unrehearsed off-road terrain Requirement: travel a 175 mile long course through the Mojave desert in no more than 10 hours Prizes: 2004: $1M, 2005: $2M, Teams: 2004, 107 teams participated (15 raced), 2005, 195 teams (23 raced, 5 finished) The route was kept secret from all teams until 2h before the race. At this time the teams were given a description of the course on a CD-ROM in a route definition data format (RDDF) In 2005 the RDDF contained 2,935 waypoints. 38
")
39 Stanley Volkswagen Touared R5 (4WD) 39

40 Stanley: Guiding principles Treat autonomous navigation as a software problem 40
 41 and a radio")
41 Stanley Sensory Equipment Environment Perception: roof rack that houses (environment sensor group): 5 SICK laser range finders A color camera for long rage perception 2 RADAR sensors Two antennae Plus, 2 additional antennae (one for GPS and one for GPS compass) 41 and a radio antennae

42 Stanley control Three main actuators: Brakes Throttle Steering 42
43 Stanley: a layered architecture Sensor interface layer- this layer is responsible for receiving and time-stamping all the data (also contains the database server with the course coordinates in RDDF) Perception layer- maps sensor data into internal models. The internal models include information about the environment and information about the vehicle s own state (with 15 variables, such as position, orientation, velocity) 43
44 Stanley: a layered architecture Planning and Control Layer- responsible for regulating the steering, throttle and brake. A key module here is the path planner, which sets the trajectory of the vehicle. The trajectory created is passed to two controllers: one for the steering and the other for the throttle and brake. Vehicle Interface Layer- responsible for interfacing with the concrete actuators. 44
45 Stanley: a layered architecture The User Interface Layer- comprises the remote E-stop and a touch screen for starting up the software. The Global Services Layer- provides services to be used by all the modules. 45

46 Stanley Free Template from 46
47 Stanley in action 47

48 DARPA Urban Grand Challenge The DARPA Urban Challenge was held on November 3, 2007 in Victorville, Calif. This event required teams to build an autonomous vehicle capable of driving in traffic, performing complex maneuvers such as merging, passing, parking and negotiating intersections 48
49 DARPA Urban Challenge 49
50 Since then 50
51 C4 51
.")
52 C4 Create an agent architecture to generated intelligent behaviour for synthetic creatures (eg. a dog). Including: Reactive behaviour Goal and expectation based behaviour Learning 52
53 C4: The architecture 53

54 C4:Working Memory Structure mirroring the psychological concept of a working memory, providing a sensory history of the objects in the world. Incorporates time Location matching is used to combine perception information of different modalities. 54

55 C4: Layers Sensory System- is a filter through which all world events pass, keeping the creature s virtual sensation honest. This layer converts visual location information to local space. Events in the world can be of different type, such as acoustic patterns or visual symbolic events. Perception System in this system what is sensed from the world is interpreted and its meaning is given to the creature. 55
 When do it? (TriggerContext What do I do it to? (ObjectContext) How long do it for?")
56 C4: Layers Prediction and Action Creatures act upon events that are likely to occur (prediction) Prediction mechanisms can extend the knowledge of the world by making associations Action system What to do? (PrimitiveActions) When do it? (TriggerContext What do I do it to? (ObjectContext) How long do it for? (DoUntilContext) What is it worth (IntrinsicValue) 56

57 C4: Layers Navigation layer Allows the creature to have spatial competencies Overrides the motor commands passed down by the action system with a more immediately appropriate motor command Motor System Executes the motor actions of the agent. 57

58 C4 in Action 58

59 Advantages of the Hybrid Architectures This approach is one of the most adopted now. It allows for a real time response of the agent combined with goal oriented behaviour. The reactivity can be privileged in relation to the deliberative level. Knowledge about the world can be also subdivided into layers with different levels of abstraction. The amount of knowledge in its layer can be restricted.

60 Disadvantages of Hybrid Architectures Lack of semantic clarity in the layered approach. Lack of conceptual clarity in the layered approach The interactions between layers are difficult to program and to test one will need to analyze all the possible interactions between these layers.
61 Extra Bibliography Designing Autonomous Agents: Theory and Practice from Biology to Engineering and Back, Ed. P. Maes, MIT Press, The Design of Intelligent Agents: a Layered Approach, Jörg Müller, Springer, Stanley: The Robot that Won the DARPA Grand Challenge, S. Thrun, et. Al., Journal of Field Robotics 23(9), , 2006 A Layered Brain Architecture for Synthetic Creatures, D. Isla, R. Burke, M. Downie and B. Blumberg, IJCAI 2001.
62 Discussion 62
LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES
 Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
ICS 606. Intelligent Autonomous Agents 1. Intelligent Autonomous Agents ICS 606 / EE 606 Fall Reactive Architectures
 Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
Agent-Based Systems. Agent-Based Systems. Michael Rovatsos. Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19
 Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
Agent-Based Systems Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 5 Reactive and Hybrid Agent Architectures 1 / 19 Where are we? Last time... Practical reasoning agents The BDI architecture Intentions
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Introduction to Multi-Agent Programming
 Introduction to Multi-Agent Programming 3. Fundamental Agent Architectures Logic-Based, Reactive, and Hybrid Architectures, CS-Freiburg Case Study Alexander Kleiner, Bernhard Nebel Contents Introduction
Introduction to Multi-Agent Programming 3. Fundamental Agent Architectures Logic-Based, Reactive, and Hybrid Architectures, CS-Freiburg Case Study Alexander Kleiner, Bernhard Nebel Contents Introduction
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
Intelligent Agents. CmpE 540 Principles of Artificial Intelligence
 CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Agents. Environments Multi-agent systems. January 18th, Agents
 Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Fundamentals of Autonomous Systems Control architectures in robotics Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 9th March 2016 Introduction Robotic paradigms
Fundamentals of Autonomous Systems Control architectures in robotics Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 9th March 2016 Introduction Robotic paradigms
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Part I Part 1 Robotic Paradigms and Control Architectures
 Overview of the Lecture Robotic Paradigms and Control Architectures Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 02 B4M36UIR Artificial
Overview of the Lecture Robotic Paradigms and Control Architectures Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 02 B4M36UIR Artificial
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
DYNAMICISM & ROBOTICS
 DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
DYNAMICISM & ROBOTICS Phil/Psych 256 Chris Eliasmith Dynamicism and Robotics A different way of being inspired by biology by behavior Recapitulate evolution (sort of) A challenge to both connectionism
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
A method to define agricultural robot behaviours
 A method to define agricultural robot behaviours Professor Simon Blackmore PhD candidate Spyros Fountas AgroTechnology The Royal Veterinary and Agricultural University Agrovej 10 DK-2630 Taastrup (Simon@unibots.com)
A method to define agricultural robot behaviours Professor Simon Blackmore PhD candidate Spyros Fountas AgroTechnology The Royal Veterinary and Agricultural University Agrovej 10 DK-2630 Taastrup (Simon@unibots.com)
Re: ENSC 370 Project Gerbil Functional Specifications
 Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
Simon Fraser University Burnaby, BC V5A 1S6 trac-tech@sfu.ca February, 16, 1999 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 370 Project Gerbil Functional
Robot Learning Letter of Intent
 Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
Outline. Chapter 2 Agents & Environments. Agents. Types of Agents: Immobots
 Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Rational Agents (Chapter 2)
") Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
MOBILE & SERVICE ROBOTICS RO OBOTIC CA 01. Supervision and control
 CY 02CFIC CFIDV MOBILE & SERVICE ROBOTICS Supervision and control Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 Supervision and Control 02CFIC CY a priori knowledge
CY 02CFIC CFIDV MOBILE & SERVICE ROBOTICS Supervision and control Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 Supervision and Control 02CFIC CY a priori knowledge
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
High-level Vision. Bernd Neumann Slides for the course in WS 2004/05. Faculty of Informatics Hamburg University Germany
 High-level Vision Bernd Neumann Slides for the course in WS 2004/05 Faculty of Informatics Hamburg University Germany neumann@informatik.uni-hamburg.de http://kogs-www.informatik.uni-hamburg.de 1 Contents
High-level Vision Bernd Neumann Slides for the course in WS 2004/05 Faculty of Informatics Hamburg University Germany neumann@informatik.uni-hamburg.de http://kogs-www.informatik.uni-hamburg.de 1 Contents
Pavlovian, Skinner and other behaviourists contribution to AI
 Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Putting Minsky and Brooks Together. Bob Hearn MIT AI Lab
 Putting Minsky and Brooks Together Bob Hearn MIT AI Lab Perception: Irreconcilable Approaches? Minsky Brooks GOFAI vs. Nouvelle AI search vs. behaviors cognition vs. perception / action abstract symbols
Putting Minsky and Brooks Together Bob Hearn MIT AI Lab Perception: Irreconcilable Approaches? Minsky Brooks GOFAI vs. Nouvelle AI search vs. behaviors cognition vs. perception / action abstract symbols
Lecture 2 Agents & Environments (Chap. 2) Outline
 Outline") Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Motion Control for Social Behaviours
 Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Motion Control for Social Behaviours Aryel Beck a.beck@ntu.edu.sg Supervisor: Nadia Magnenat-Thalmann Collaborators: Zhang Zhijun, Rubha Shri Narayanan, Neetha Das 10-03-2015 INTRODUCTION In order for
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Perceptual Anchoring with Indefinite Descriptions
 Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
 http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
Grounding Ontologies in the External World
 Grounding Ontologies in the External World Antonio CHELLA University of Palermo and ICAR-CNR, Palermo antonio.chella@unipa.it Abstract. The paper discusses a case study of grounding an ontology in the
Grounding Ontologies in the External World Antonio CHELLA University of Palermo and ICAR-CNR, Palermo antonio.chella@unipa.it Abstract. The paper discusses a case study of grounding an ontology in the
EICA: Combining Interactivity with Autonomy for Social Robots
 EICA: Combining Interactivity with Autonomy for Social Robots Yasser F. O. Mohammad 1, Toyoaki Nishida 2 Nishida-Sumi Laboratory, Department of Intelligence Science and Technology, Graduate School of Informatics,
EICA: Combining Interactivity with Autonomy for Social Robots Yasser F. O. Mohammad 1, Toyoaki Nishida 2 Nishida-Sumi Laboratory, Department of Intelligence Science and Technology, Graduate School of Informatics,
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
What is AI? The science of making machines that: Think rationally. Think like people. Act like people. Act rationally
 What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Agents and State Spaces. CSCI 446: Artificial Intelligence
 Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
An Abstract Behavior Representation for Robust, Dynamic Sequencing in a Hybrid Architecture
 An Abstract Behavior Representation for Robust, Dynamic Sequencing in a Hybrid Architecture Jeffrey P. Duffy and Gilbert L. Peterson Air Force Institute of Technology 2950 Hobson Way WPAFB OH 45433-7765
An Abstract Behavior Representation for Robust, Dynamic Sequencing in a Hybrid Architecture Jeffrey P. Duffy and Gilbert L. Peterson Air Force Institute of Technology 2950 Hobson Way WPAFB OH 45433-7765
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Semiotics and Intelligent Control
 Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Intelligent Agents. Outline. Agents. Agents and environments
 Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Artificial Intelligence Agents and Environments 1
 Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Theoretical Neuroscience: The Binding Problem Jan Scholz, , University of Osnabrück
 The Binding Problem This lecture is based on following articles: Adina L. Roskies: The Binding Problem; Neuron 1999 24: 7 Charles M. Gray: The Temporal Correlation Hypothesis of Visual Feature Integration:
The Binding Problem This lecture is based on following articles: Adina L. Roskies: The Binding Problem; Neuron 1999 24: 7 Charles M. Gray: The Temporal Correlation Hypothesis of Visual Feature Integration:
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Behavioral Pattern Identification Through Rough Set Modelling
 Behavioral Pattern Identification Through Rough Set Modelling Jan G. Bazan 1,JamesF.Peters 2, and Andrzej Skowron 3 1 Institute of Mathematics, University of Rzeszów, Rejtana 16A, 35-959 Rzeszów, Poland
Behavioral Pattern Identification Through Rough Set Modelling Jan G. Bazan 1,JamesF.Peters 2, and Andrzej Skowron 3 1 Institute of Mathematics, University of Rzeszów, Rejtana 16A, 35-959 Rzeszów, Poland
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
An Escalation Model of Consciousness
 Bailey!1 Ben Bailey Current Issues in Cognitive Science Mark Feinstein 2015-12-18 An Escalation Model of Consciousness Introduction The idea of consciousness has plagued humanity since its inception. Humans
Bailey!1 Ben Bailey Current Issues in Cognitive Science Mark Feinstein 2015-12-18 An Escalation Model of Consciousness Introduction The idea of consciousness has plagued humanity since its inception. Humans
A brief comparison between the Subsumption Architecture and Motor Schema Theory in light of Autonomous Exploration by Behavior
 A brief comparison between the Subsumption Architecture and Motor Schema Theory in light of Autonomous Exploration by Behavior Based Robots Dip N. Ray 1*, S. Mukhopadhyay 2, and S. Majumder 1 1 Surface
A brief comparison between the Subsumption Architecture and Motor Schema Theory in light of Autonomous Exploration by Behavior Based Robots Dip N. Ray 1*, S. Mukhopadhyay 2, and S. Majumder 1 1 Surface
Developing World Model Data Specifications as Metrics for Sensory Processing for On-Road Driving Tasks
 Developing World Model Data Specifications as Metrics for Sensory Processing for On-Road Driving Tasks Anthony Barbera*, John Horst*, Craig Schlenoff*, Evan Wallace*, David Aha # *National Institute of
Developing World Model Data Specifications as Metrics for Sensory Processing for On-Road Driving Tasks Anthony Barbera*, John Horst*, Craig Schlenoff*, Evan Wallace*, David Aha # *National Institute of
38. Behavior-Based Systems
 Maja J. Matarić, François Michaud 38. Behavior-Based Systems 891 Nature is filled with examples of autonomous creatures capable of dealing with the diversity, unpredictability, and rapidly changing conditions
Maja J. Matarić, François Michaud 38. Behavior-Based Systems 891 Nature is filled with examples of autonomous creatures capable of dealing with the diversity, unpredictability, and rapidly changing conditions
Programming with Goals (3)
") Programming with Goals (3) M. Birna van Riemsdijk, TU Delft, The Netherlands GOAL slides adapted from MAS course slides by Hindriks 4/24/11 Delft University of Technology Challenge the future Outline GOAL:
Programming with Goals (3) M. Birna van Riemsdijk, TU Delft, The Netherlands GOAL slides adapted from MAS course slides by Hindriks 4/24/11 Delft University of Technology Challenge the future Outline GOAL:
On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3
 Matt Loper / Brown University Presented for CS296-3") On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3 February 14th, 2007 Introduction What is a good control architecture for a robot? How should it coordinate long
On Three Layer Architectures (Erann Gat) Matt Loper / Brown University Presented for CS296-3 February 14th, 2007 Introduction What is a good control architecture for a robot? How should it coordinate long
Embodiment in GLAIR: A Grounded Layered Architecture. with Integrated Reasoning for Autonomous Agents. Henry Hexmoor. Johan Lammens.
 Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
A Matrix of Material Representation
 A Matrix of Material Representation Hengfeng Zuo a, Mark Jones b, Tony Hope a, a Design and Advanced Technology Research Centre, Southampton Institute, UK b Product Design Group, Faculty of Technology,
A Matrix of Material Representation Hengfeng Zuo a, Mark Jones b, Tony Hope a, a Design and Advanced Technology Research Centre, Southampton Institute, UK b Product Design Group, Faculty of Technology,
CHAPTER 6 DESIGN AND ARCHITECTURE OF REAL TIME WEB-CENTRIC TELEHEALTH DIABETES DIAGNOSIS EXPERT SYSTEM
 87 CHAPTER 6 DESIGN AND ARCHITECTURE OF REAL TIME WEB-CENTRIC TELEHEALTH DIABETES DIAGNOSIS EXPERT SYSTEM 6.1 INTRODUCTION This chapter presents the design and architecture of real time Web centric telehealth
87 CHAPTER 6 DESIGN AND ARCHITECTURE OF REAL TIME WEB-CENTRIC TELEHEALTH DIABETES DIAGNOSIS EXPERT SYSTEM 6.1 INTRODUCTION This chapter presents the design and architecture of real time Web centric telehealth
Affective Action Selection and Behavior Arbitration for Autonomous Robots
 Affective Action Selection and Behavior Arbitration for Autonomous Robots Matthias Scheutz Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, USA mscheutz@cse.nd.edu
Affective Action Selection and Behavior Arbitration for Autonomous Robots Matthias Scheutz Department of Computer Science and Engineering University of Notre Dame Notre Dame, IN 46556, USA mscheutz@cse.nd.edu
M.Sc. in Cognitive Systems. Model Curriculum
 M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
AIR FORCE INSTITUTE OF TECHNOLOGY
 Dynamic Behavior Sequencing in a Hybrid Robot Architecture THESIS Jeffrey P. Duffy, Captain, USAF AFIT/GCE/ENG/08-03 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
Dynamic Behavior Sequencing in a Hybrid Robot Architecture THESIS Jeffrey P. Duffy, Captain, USAF AFIT/GCE/ENG/08-03 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson
A Motivation-Based Action-Selection-Mechanism Involving Temporal Prediction
 A Motivation-Based Action-Selection-Mechanism Involving Temporal Prediction Woo Young Kwon and Il Hong Suh Abstract Selecting the appropriate action to accomplish a given task is one of the most important
A Motivation-Based Action-Selection-Mechanism Involving Temporal Prediction Woo Young Kwon and Il Hong Suh Abstract Selecting the appropriate action to accomplish a given task is one of the most important
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space
 Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space Shrihari Vasudevan Advisor: Prof. Dr. Roland Siegwart Autonomous Systems Lab, ETH Zurich, Switzerland.
Spatial Cognition for Mobile Robots: A Hierarchical Probabilistic Concept- Oriented Representation of Space Shrihari Vasudevan Advisor: Prof. Dr. Roland Siegwart Autonomous Systems Lab, ETH Zurich, Switzerland.
Implementation of Perception Classification based on BDI Model using Bayesian Classifier
 Implementation of Perception Classification based on BDI Model using Bayesian Classifier Vishwanath Y 1 Murali T S 2 Dr M.V Vijayakumar 3 1 Research Scholar, Dept. of Computer Science & Engineering, Jain
Implementation of Perception Classification based on BDI Model using Bayesian Classifier Vishwanath Y 1 Murali T S 2 Dr M.V Vijayakumar 3 1 Research Scholar, Dept. of Computer Science & Engineering, Jain
Ontologies for World Modeling in Autonomous Vehicles
 Ontologies for World Modeling in Autonomous Vehicles Mike Uschold, Ron Provine, Scott Smith The Boeing Company P.O. Box 3707,m/s 7L-40 Seattle, WA USA 98124-2207 michael.f.uschold@boeing.com Craig Schlenoff,
Ontologies for World Modeling in Autonomous Vehicles Mike Uschold, Ron Provine, Scott Smith The Boeing Company P.O. Box 3707,m/s 7L-40 Seattle, WA USA 98124-2207 michael.f.uschold@boeing.com Craig Schlenoff,
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
Chapter 3. Information Input and Processing Part II* Prepared by: Ahmed M. El-Sherbeeny, PhD *(Adapted from Slides by: Dr.
 Chapter 3. Information Input and Processing Part II* Prepared by: Ahmed M. El-Sherbeeny, PhD *(Adapted from Slides by: Dr. Khaled Al-Saleh) 1 Information: How it can be measured (part I) How it can be
Chapter 3. Information Input and Processing Part II* Prepared by: Ahmed M. El-Sherbeeny, PhD *(Adapted from Slides by: Dr. Khaled Al-Saleh) 1 Information: How it can be measured (part I) How it can be
EEL-5840 Elements of {Artificial} Machine Intelligence
 Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Using progressive adaptability against the complexity of modeling emotionally influenced virtual agents
 Using progressive adaptability against the complexity of modeling emotionally influenced virtual agents Ricardo Imbert Facultad de Informática Universidad Politécnica de Madrid rimbert@fi.upm.es Angélica
Using progressive adaptability against the complexity of modeling emotionally influenced virtual agents Ricardo Imbert Facultad de Informática Universidad Politécnica de Madrid rimbert@fi.upm.es Angélica
An Overview on Soft Computing in Behavior Based Robotics
 An Overview on Soft Computing in Behavior Based Robotics Frank Hoffmann Fakultät Elektrotechnik und Informationstechnik Universität Dortmund D-44221 Dortmund (Germany) E-mail: hoffmann@esr.e-technik.uni-dortmund.de
An Overview on Soft Computing in Behavior Based Robotics Frank Hoffmann Fakultät Elektrotechnik und Informationstechnik Universität Dortmund D-44221 Dortmund (Germany) E-mail: hoffmann@esr.e-technik.uni-dortmund.de
Topological Considerations of Memory Structure
 Procedia Computer Science Volume 41, 2014, Pages 45 50 This space is reserved for the Procedia header, do not use it BICA 2014. 5th Annual International Conference on Biologically Inspired Cognitive Architectures
Procedia Computer Science Volume 41, 2014, Pages 45 50 This space is reserved for the Procedia header, do not use it BICA 2014. 5th Annual International Conference on Biologically Inspired Cognitive Architectures
Rethinking Cognitive Architecture!
 Rethinking Cognitive Architecture! Reconciling Uniformity and Diversity via Graphical Models! Paul Rosenbloom!!! 1/25/2010! Department of Computer Science &! Institute for Creative Technologies! The projects
Rethinking Cognitive Architecture! Reconciling Uniformity and Diversity via Graphical Models! Paul Rosenbloom!!! 1/25/2010! Department of Computer Science &! Institute for Creative Technologies! The projects
WP 7: Emotion in Cognition and Action
 WP 7: Emotion in Cognition and Action Lola Cañamero, UH 2 nd Plenary, May 24-27 2005, Newcastle WP7: The context Emotion in cognition & action in multi-modal interfaces? Emotion-oriented systems adapted
WP 7: Emotion in Cognition and Action Lola Cañamero, UH 2 nd Plenary, May 24-27 2005, Newcastle WP7: The context Emotion in cognition & action in multi-modal interfaces? Emotion-oriented systems adapted
Oxford Foundation for Theoretical Neuroscience and Artificial Intelligence
 Oxford Foundation for Theoretical Neuroscience and Artificial Intelligence Oxford Foundation for Theoretical Neuroscience and Artificial Intelligence For over two millennia, philosophers and scientists
Oxford Foundation for Theoretical Neuroscience and Artificial Intelligence Oxford Foundation for Theoretical Neuroscience and Artificial Intelligence For over two millennia, philosophers and scientists
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement
 ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
Design of the Autonomous Intelligent Simulation Model(AISM) using Computer Generated Force
 using Computer Generated Force") Design of the Autonomous Intelligent Simulation Model(AISM) using Computer Generated Force SeongKee Lee, ChanGon Yoo, JungChan Park, JaeHyun Park, MyongGu Kang Directorate of Software Weapon Agency for
Design of the Autonomous Intelligent Simulation Model(AISM) using Computer Generated Force SeongKee Lee, ChanGon Yoo, JungChan Park, JaeHyun Park, MyongGu Kang Directorate of Software Weapon Agency for
Lecture 6. Perceptual and Motor Schemas
 CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
Multi-agent Engineering. Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture. Ivan Tanev.
 Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
Learning Navigational Maps by Observing the Movement of Crowds
 Learning Navigational Maps by Observing the Movement of Crowds Simon T. O Callaghan Australia, NSW s.ocallaghan@acfr.usyd.edu.au Surya P. N. Singh Australia, NSW spns@acfr.usyd.edu.au Fabio T. Ramos Australia,
Learning Navigational Maps by Observing the Movement of Crowds Simon T. O Callaghan Australia, NSW s.ocallaghan@acfr.usyd.edu.au Surya P. N. Singh Australia, NSW spns@acfr.usyd.edu.au Fabio T. Ramos Australia,
Lecture 2.1 What is Perception?
 Lecture 2.1 What is Perception? A Central Ideas in Perception: Perception is more than the sum of sensory inputs. It involves active bottom-up and topdown processing. Perception is not a veridical representation
Lecture 2.1 What is Perception? A Central Ideas in Perception: Perception is more than the sum of sensory inputs. It involves active bottom-up and topdown processing. Perception is not a veridical representation
AVR Based Gesture Vocalizer Using Speech Synthesizer IC
 AVR Based Gesture Vocalizer Using Speech Synthesizer IC Mr.M.V.N.R.P.kumar 1, Mr.Ashutosh Kumar 2, Ms. S.B.Arawandekar 3, Mr.A. A. Bhosale 4, Mr. R. L. Bhosale 5 Dept. Of E&TC, L.N.B.C.I.E.T. Raigaon,
AVR Based Gesture Vocalizer Using Speech Synthesizer IC Mr.M.V.N.R.P.kumar 1, Mr.Ashutosh Kumar 2, Ms. S.B.Arawandekar 3, Mr.A. A. Bhosale 4, Mr. R. L. Bhosale 5 Dept. Of E&TC, L.N.B.C.I.E.T. Raigaon,
A Computational Framework for Concept Formation for a Situated Design Agent
 A Computational Framework for Concept Formation for a Situated Design Agent John S Gero Key Centre of Design Computing and Cognition University of Sydney NSW 2006 Australia john@arch.usyd.edu.au and Haruyuki
A Computational Framework for Concept Formation for a Situated Design Agent John S Gero Key Centre of Design Computing and Cognition University of Sydney NSW 2006 Australia john@arch.usyd.edu.au and Haruyuki
MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES
 MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES Marc Manz, Sebastian Bartsch, and Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovation Center Director: Prof. Dr. Frank
MANTIS A ROBOT WITH ADVANCED LOCOMOTION AND MANIPULATION ABILITIES Marc Manz, Sebastian Bartsch, and Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovation Center Director: Prof. Dr. Frank
A Model of Computation and Representation in the Brain
 A Model of Computation and Representation in the Brain James S. Albus Krasnow Institute for Advanced Studies 1 George Mason University Fairfax, Virginia james.albus@gmail.com Short abstract The brain is
A Model of Computation and Representation in the Brain James S. Albus Krasnow Institute for Advanced Studies 1 George Mason University Fairfax, Virginia james.albus@gmail.com Short abstract The brain is
NEURAL SYSTEMS FOR INTEGRATING ROBOT BEHAVIOURS
 NEURAL SYSTEMS FOR INTEGRATING ROBOT BEHAVIOURS Brett Browning & Gordon Wyeth University of Queensland Computer Science and Electrical Engineering Department Email: browning@elec.uq.edu.au & wyeth@elec.uq.edu.au
NEURAL SYSTEMS FOR INTEGRATING ROBOT BEHAVIOURS Brett Browning & Gordon Wyeth University of Queensland Computer Science and Electrical Engineering Department Email: browning@elec.uq.edu.au & wyeth@elec.uq.edu.au
The Schema is Mightier Than the Sword Using Player Cognition to Predict Gaming Behavior
 The Schema is Mightier Than the Sword Using Player Cognition to Predict Gaming Behavior Vanessa Hemovich, Ph.D. Associate Professor of Psychology DigiPen Institute of Technology Today s Talk: Cognitive
The Schema is Mightier Than the Sword Using Player Cognition to Predict Gaming Behavior Vanessa Hemovich, Ph.D. Associate Professor of Psychology DigiPen Institute of Technology Today s Talk: Cognitive
Proposal for a Multiagent Architecture for Self-Organizing Systems (MA-SOS)
") Proposal for a Multiagent Architecture for Self-Organizing Systems (MA-SOS) Niriaska Perozo 1, Jose Aguilar 2, and Oswaldo Terán 3 1 Unidad de Investigación en Inteligencia Artificial, UCLA, Barquisimeto
Proposal for a Multiagent Architecture for Self-Organizing Systems (MA-SOS) Niriaska Perozo 1, Jose Aguilar 2, and Oswaldo Terán 3 1 Unidad de Investigación en Inteligencia Artificial, UCLA, Barquisimeto
Fuzzy Motivations in Behavior Based Agents
 Fuzzy Motivations in Behavior Based Agents Tomás V. Arredondo Universidad Técnica Federico Santa María, Valparaíso, Chile, Departamento de Electrónica, Casilla 110 V, Valparaíso, Chile tarredondo@elo.utfsm.cl
Fuzzy Motivations in Behavior Based Agents Tomás V. Arredondo Universidad Técnica Federico Santa María, Valparaíso, Chile, Departamento de Electrónica, Casilla 110 V, Valparaíso, Chile tarredondo@elo.utfsm.cl