Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
|
|
|
- Earl Rose
- 5 years ago
- Views:
Transcription
1 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology
2 Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3

3 Literature Chapters 2, 6, 13,
4 Literature
5 Literature

6 Java Agent Development Framework 6
7 What is an Agent? An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Human agent: eyes, ears, and other organs for sensors; hands, legs, mouth, and other body parts for actuators Robotic agent: cameras and infrared range finders for sensors; various motors for actuators
8 Agents and environments The agent function maps from percept histories to actions: [f: P* à A] The agent program runs on the physical architecture to produce f Agent = architecture + program
9 Vacuum-Cleaner World Percepts: location and contents, e.g., [A,Dirty] Actions: Left, Right, Suck, NoOp
10 A Vacuum-Cleaner Agent
11 Capabilities An agent is capable of flexible action in some environment By flexible, we mean: w reactive w pro-active w social 11
12 Reactivity If a program s environment is guaranteed to be fixed, the program need never worry about its own success or failure program just executes blindly w Example of fixed environment: compiler The real world is not like that: things change, information is incomplete. Many (most?) interesting environments are dynamic A reactive system is one that maintains an ongoing interaction with its environment, and responds to changes that occur in it (in time for the response to be useful) 12
13 Proactiveness Reacting to an environment is easy (e.g., stimulus response rules) But we generally want agents to do things for us Hence goal directed behavior Pro-activeness = generating and attempting to achieve goals w Not driven solely by events w Taking the initiative w Recognizing opportunities 13
14 Balancing Reactive and Goal- Oriented Behavior We want our agents to be reactive, responding to changing conditions in an appropriate (timely) fashion We want our agents to systematically work towards long-term goals These two considerations can be at odds with one another Designing an agent that can balance the two remains an open research problem 14
15 Social Ability The real world is a multi-agent environment: we cannot go around attempting to achieve goals without taking others into account Some goals can only be achieved with the cooperation of others Social ability in agents is the ability to interact with other agents (and possibly humans) via some kind of agentcommunication language with the goal to let other agents to make commitments 15
16 Rational Agents An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful Success to be measured w.r.t. an agent-local perspective Performance measure: An objective criterion for success of an agent's behavior E.g., performance measure of a vacuum-cleaner agent could be amount of dirt cleaned up, amount of time taken, amount of electricity consumed, amount of noise generated, etc. 16
17 Rational Agents Rational Agent: For each possible percept sequence, a rational agent w should select an action w that is expected to maximize its local performance measure, w given the evidence provided by the percept sequence and w whatever built-in knowledge the agent has. Rational = Intelligent 17
18 Autonomous Agents Rationality is distinct from omniscience (allknowing with infinite knowledge) Agents can perform actions in order to modify future percepts so as to obtain useful information (information gathering, exploration) An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) 18
19 Other Properties Mobility: the ability of an agent to move around an electronic network, real environment (Veracity: an agent will not knowingly communicate false information) Benevolence: agents do not have conflicting goals, and every agent will therefore always try to do what is asked Learning/adaption: agents improve performance over time 19
20 Agents and Objects Are agents just objects by another name? Object: w Encapsulates some state w Interacts synchronously with other objects communicates via message passing call methods / generic functions w Has methods, corresponding to operations that may be performed on this state 20
21 Agents and Objects Main differences: w Agents are autonomous: agents embody stronger notion of autonomy than objects, and in particular, they decide for themselves whether or not to perform an action on request from another agent w Agents are capable of flexible (reactive, pro-active, social) behavior, and the standard object model has nothing to say about such types of behavior w Agents are inherently multi-threaded, in that each agent is assumed to have at least one thread of active control 21
22 Main Features Performance measure Environment Actuators Sensors Must first specify the setting for intelligent agent design
23 PEAS Consider, e.g., the task of designing an automated taxi driver: w Performance measure: Safe, fast, legal, comfortable trip, maximize profits w Environment: Roads, other traffic, pedestrians, customers w Actuators: Steering wheel, accelerator, brake, signal, horn w Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors
24 PEAS Agent: Medical diagnosis system w Performance measure: Healthy patient, minimize costs, lawsuits w Environment: Patient, hospital, staff w Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) w Sensors: Keyboard (entry of symptoms, findings, patient's answers)
25 PEAS Agent: Part-picking robot w Performance measure: Percentage of parts in correct bins relative to number of parts on the ground w Environment: Area with parts, bins w Actuators: Jointed arm and hand w Sensors: Camera, joint angle sensors
26 PEAS Agent: Interactive English tutor w Performance measure: Maximize student's score on test w Environment: Set of students w Actuators: Screen display (exercises, suggestions, corrections) w Sensors: Keyboard
27 Environment Types Fully observable (vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time. Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. (If the environment is deterministic except for the actions of other agents, then the environment is strategic) Episodic (vs. sequential): The agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself.
28 Environment Types Static (vs. dynamic): The environment is unchanged while an agent is deliberating. (The environment is semidynamic if the environment itself does not change with the passage of time but the agent's performance score does) Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single agent (vs. multiagent): An agent operating by itself in an environment.
29 Environment Types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
30 Environment Types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
31 Environment Types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
32 Environment Types Chess with Chess without Taxi driving a clock a clock Fully observable Yes Yes No Deterministic Strategic Strategic No Episodic No No No Static Semi Yes No Discrete Yes Yes No Single agent No No No The environment type largely determines the agent design The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent
33 Agent Functions and Programs An agent is completely specified by the agent function mapping percept sequences to actions One agent function (or a small equivalence class) is rational Aim: find a way to implement the rational agent function concisely
34 Table-Lookup Agent Drawbacks: w Huge table w Take a long time to build the table w No autonomy w Even with learning, need a long time to learn the table entries
35 Agent Types Four basic types in order of increasing generality: w Simple reflex agents w Model-based reflex agents w Goal-based agents w Utility-based agents

36 Simple Reflex Agents
37 Model-Based Reflex Agents
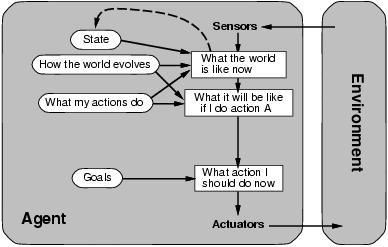
38 Goal-Based Agents
39 Utility-Based Agents

40 Learning Agents
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Intelligent Agents. Outline. Agents. Agents and environments
 Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Outline for Chapter 2. Agents. Agents. Agents and environments. Vacuum- cleaner world. A vacuum- cleaner agent 8/27/15
 Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Outline. Chapter 2 Agents & Environments. Agents. Types of Agents: Immobots
 Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Intelligent Agents. CmpE 540 Principles of Artificial Intelligence
 CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
Artificial Intelligence Agents and Environments 1
 Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
Intelligent Agents. BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University. Slides are mostly adapted from AIMA
 1 Intelligent Agents BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
1 Intelligent Agents BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University Slides are mostly adapted from AIMA Outline 2 Agents and environments Rationality PEAS (Performance
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
AI: Intelligent Agents. Chapter 2
 AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
CS 331: Artificial Intelligence Intelligent Agents. Agent-Related Terms. Question du Jour. Rationality. General Properties of AI Systems
 General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
Lecture 2 Agents & Environments (Chap. 2) Outline
 Outline") Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Rational Agents (Chapter 2)
") Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents. Environments Multi-agent systems. January 18th, Agents
 Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
22c:145 Artificial Intelligence
 22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
Intelligent Agents. Chapter 2
 Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Intelligent Agents. Russell and Norvig: Chapter 2
 Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Agents. This course is about designing intelligent agents Agents and environments. Rationality. The vacuum-cleaner world
 This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Artificial Intelligence Intelligent agents
 Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
What is AI? The science of making machines that: Think rationally. Think like people. Act like people. Act rationally
 What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Agents. Formalizing Task Environments. What s an agent? The agent and the environment. Environments. Example: the automated taxi driver (PEAS)
") What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Agents and Environments. Stephen G. Ware CSCI 4525 / 5525
 Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
Agents and State Spaces. CSCI 446: Artificial Intelligence
 Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
KECERDASAN BUATAN 3. By Sirait. Hasanuddin Sirait, MT
 KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
Agents and Environments
 Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS
 1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
AI Programming CS F-04 Agent Oriented Programming
 AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
Ar#ficial Intelligence
 Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Silvia Rossi. Agent as Intentional Systems. Lezione n. Corso di Laurea: Informatica. Insegnamento: Sistemi multi-agente.
 Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
CS324-Artificial Intelligence
 CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
Agents and State Spaces. CSCI 446: Ar*ficial Intelligence Keith Vertanen
 Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
Solutions for Chapter 2 Intelligent Agents
 Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Agents. Robert Platt Northeastern University. Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS Seif El-Nasr, CS4100
 Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Multi-agent Engineering. Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture. Ivan Tanev.
 Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
Multi-agent Engineering Lecture 4 Concrete Architectures for Intelligent Agents. Belief-Desire-Intention Architecture Ivan Tanev 1 Outline 1. Concrete architectures 2. Belief-Desire-Intention (BDI) Architecture.
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE
 GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
Embodiment in GLAIR: A Grounded Layered Architecture. with Integrated Reasoning for Autonomous Agents. Henry Hexmoor. Johan Lammens.
 Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Embodiment in GLAIR: A Grounded Layered Architecture with Integrated Reasoning for Autonomous Agents Henry Hexmoor Johan Lammens Stuart Shapiro Computer Science Department 226 Bell Hall State University
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
Reactivity and Deliberation in Decision-Making Systems
 11 Reactivity and Deliberation in Decision-Making Systems Carle Côté 11.1 Introduction 11.2 Let s Begin at the Beginning 11.3 Common Pitfall #1 : One Decision Model to Rule Them All! 11.4 Common Pitfall
11 Reactivity and Deliberation in Decision-Making Systems Carle Côté 11.1 Introduction 11.2 Let s Begin at the Beginning 11.3 Common Pitfall #1 : One Decision Model to Rule Them All! 11.4 Common Pitfall
LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES
 Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
Reactive Architectures LECTURE 5: REACTIVE AND HYBRID ARCHITECTURES An Introduction to MultiAgent Systems http://www.csc.liv.ac.uk/~mjw/pubs/imas There are many unsolved (some would say insoluble) problems
Four Example Application Domains
 Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Programming with Goals (3)
") Programming with Goals (3) M. Birna van Riemsdijk, TU Delft, The Netherlands GOAL slides adapted from MAS course slides by Hindriks 4/24/11 Delft University of Technology Challenge the future Outline GOAL:
Programming with Goals (3) M. Birna van Riemsdijk, TU Delft, The Netherlands GOAL slides adapted from MAS course slides by Hindriks 4/24/11 Delft University of Technology Challenge the future Outline GOAL:
Lecture 5- Hybrid Agents 2015/2016
 Lecture 5- Hybrid Agents 2015/2016 Ana Paiva * These slides are based on the book by Prof. M. Woodridge An Introduction to Multiagent Systems and the slides online compiled by Professor Jeffrey S. Rosenschein..
Lecture 5- Hybrid Agents 2015/2016 Ana Paiva * These slides are based on the book by Prof. M. Woodridge An Introduction to Multiagent Systems and the slides online compiled by Professor Jeffrey S. Rosenschein..
 http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
http://www.diva-portal.org This is the published version of a paper presented at Future Active Safety Technology - Towards zero traffic accidents, FastZero2017, September 18-22, 2017, Nara, Japan. Citation
1) Principle of Proactivity
 Principle of Proactivity") 1) Principle of Proactivity Principle of proactivity teaches us that we can influence our life to a much greater extend than we usually think. It even states that we are the cause of majority of things
1) Principle of Proactivity Principle of proactivity teaches us that we can influence our life to a much greater extend than we usually think. It even states that we are the cause of majority of things
ICS 606. Intelligent Autonomous Agents 1. Intelligent Autonomous Agents ICS 606 / EE 606 Fall Reactive Architectures
 Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
Intelligent Autonomous Agents ICS 606 / EE 606 Fall 2011 Nancy E. Reed nreed@hawaii.edu 1 Lecture #5 Reactive and Hybrid Agents Reactive Architectures Brooks and behaviors The subsumption architecture
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Robot Learning Letter of Intent
 Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
Research Proposal: Robot Learning Letter of Intent BY ERIK BILLING billing@cs.umu.se 2006-04-11 SUMMARY The proposed project s aim is to further develop the learning aspects in Behavior Based Control (BBC)
5.8 Departure from cognitivism: dynamical systems
 154 consciousness, on the other, was completely severed (Thompson, 2007a, p. 5). Consequently as Thompson claims cognitivism works with inadequate notion of cognition. This statement is at odds with practical
154 consciousness, on the other, was completely severed (Thompson, 2007a, p. 5). Consequently as Thompson claims cognitivism works with inadequate notion of cognition. This statement is at odds with practical
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
EEL-5840 Elements of {Artificial} Machine Intelligence
 Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Perceptual Anchoring with Indefinite Descriptions
 Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Sequential Decision Making
 Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
Situated Coordination
 Situated Coordination Distributed Systems L-A Sistemi Distribuiti L-A Andrea Omicini & Matteo Casadei andrea.omicini@unibo.it, m.casadei@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna
Situated Coordination Distributed Systems L-A Sistemi Distribuiti L-A Andrea Omicini & Matteo Casadei andrea.omicini@unibo.it, m.casadei@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna
Semiotics and Intelligent Control
 Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Semiotics and Intelligent Control Morten Lind 0rsted-DTU: Section of Automation, Technical University of Denmark, DK-2800 Kgs. Lyngby, Denmark. m/i@oersted.dtu.dk Abstract: Key words: The overall purpose
Reflecting on Reflexes
 Reflecting on Reflexes Pre-Lesson Quiz 1. What happens when you accidentally touch a hot plate? 2. Name two human reflexes and state how they work. 2 Pre-Lesson Quiz Answers 1. What happens when you accidentally
Reflecting on Reflexes Pre-Lesson Quiz 1. What happens when you accidentally touch a hot plate? 2. Name two human reflexes and state how they work. 2 Pre-Lesson Quiz Answers 1. What happens when you accidentally
A Computational Framework for Concept Formation for a Situated Design Agent
 A Computational Framework for Concept Formation for a Situated Design Agent John S Gero Key Centre of Design Computing and Cognition University of Sydney NSW 2006 Australia john@arch.usyd.edu.au and Haruyuki
A Computational Framework for Concept Formation for a Situated Design Agent John S Gero Key Centre of Design Computing and Cognition University of Sydney NSW 2006 Australia john@arch.usyd.edu.au and Haruyuki
Reinforcement Learning
 Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
S p e c i a l R e p o r t. The Top 10 Things You Must Know Before Choosing Your. Dentist
 S p e c i a l R e p o r t The Top 10 Things You Must Know Before Choosing Your Turtle Town Dental Introductory Letter from the Doctors of Turtle Town Dental Dear Friend, As the doctors of Turtle Town Dental,
S p e c i a l R e p o r t The Top 10 Things You Must Know Before Choosing Your Turtle Town Dental Introductory Letter from the Doctors of Turtle Town Dental Dear Friend, As the doctors of Turtle Town Dental,
Agents as Intentional Systems
 Agents as Intentional Systems Multiagent Systems LS Sistemi Multiagente LS Andrea Omicini & Michele Piunti {andrea.omicini, michele.piunti}@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna
Agents as Intentional Systems Multiagent Systems LS Sistemi Multiagente LS Andrea Omicini & Michele Piunti {andrea.omicini, michele.piunti}@unibo.it Ingegneria Due Alma Mater Studiorum Università di Bologna
Definitions. The science of making machines that: This slide deck courtesy of Dan Klein at UC Berkeley
 Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Nash Equilibrium and Dynamics
 Nash Equilibrium and Dynamics Sergiu Hart September 12, 2008 John F. Nash, Jr., submitted his Ph.D. dissertation entitled Non-Cooperative Games to Princeton University in 1950. Read it 58 years later,
Nash Equilibrium and Dynamics Sergiu Hart September 12, 2008 John F. Nash, Jr., submitted his Ph.D. dissertation entitled Non-Cooperative Games to Princeton University in 1950. Read it 58 years later,
Learning and Adaptive Behavior, Part II
 Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Motivations and Goal-Directed Autonomy
 Motivations and Goal-Directed Autonomy Felipe Meneguzzi Robotics Institute Carnegie Mellon University 5000 Forbes Ave. Pittsburgh, Pennsylvania 15213 meneguzzi@cmu.edu Abstract As we move towards a richer
Motivations and Goal-Directed Autonomy Felipe Meneguzzi Robotics Institute Carnegie Mellon University 5000 Forbes Ave. Pittsburgh, Pennsylvania 15213 meneguzzi@cmu.edu Abstract As we move towards a richer
High Performance Teams
 High Performance Teams www.loyalisttraining.com 1-877-887-8223 By: Paul Fergus: President Peak Performance 2 paul@peakperformance2.com 1-877-633-9555 In a Team We re All in the Same Boat Sure glad the
High Performance Teams www.loyalisttraining.com 1-877-887-8223 By: Paul Fergus: President Peak Performance 2 paul@peakperformance2.com 1-877-633-9555 In a Team We re All in the Same Boat Sure glad the
Internalized Motivation in the Classroom
 Internalized Motivation in the Classroom Motivation Exercise 20-30 min. The motivation that students bring to a classroom setting is critical in determining how much, and how well, they learn. This activity
Internalized Motivation in the Classroom Motivation Exercise 20-30 min. The motivation that students bring to a classroom setting is critical in determining how much, and how well, they learn. This activity
A Cooperative Multiagent Architecture for Turkish Sign Tutors
 A Cooperative Multiagent Architecture for Turkish Sign Tutors İlker YILDIRIM Department of Computer Engineering Bogazici University, Bebek, 34342, Turkey ilker.yildirim@boun.edu.tr EASSS 2008 1 Outline
A Cooperative Multiagent Architecture for Turkish Sign Tutors İlker YILDIRIM Department of Computer Engineering Bogazici University, Bebek, 34342, Turkey ilker.yildirim@boun.edu.tr EASSS 2008 1 Outline
Category-Based Intrinsic Motivation
 Category-Based Intrinsic Motivation Lisa Meeden Rachel Lee Ryan Walker Swarthmore College, USA James Marshall Sarah Lawrence College, USA 9th International Conference on Epigenetic Robotics Venice, Italy
Category-Based Intrinsic Motivation Lisa Meeden Rachel Lee Ryan Walker Swarthmore College, USA James Marshall Sarah Lawrence College, USA 9th International Conference on Epigenetic Robotics Venice, Italy