Intelligent Agents. BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University. Slides are mostly adapted from AIMA
|
|
|
- Meredith Malone
- 5 years ago
- Views:
Transcription
1 1 Intelligent Agents BBM 405 Fundamentals of Artificial Intelligence Pinar Duygulu Hacettepe University Slides are mostly adapted from AIMA
2 Outline 2 Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
3 Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Assumption: Every agent can perceive its own actions (but not always the effects) 3
4 Agents Human agent: eyes, ears, and other organs for sensors; hands,legs, mouth, and other body parts for actuators 4 Robotic agent: cameras and infrared range finders for sensors; various motors for actuators A software agent: Keystrokes, file contents, received network packages as sensors Displays on the screen, files, sent network packets as actuators
5 Agents and environments 5 Percept: agent s perceptual input at any given instant Percept sequence: complete history of everything the agent has ever perceived An agent s choice of action at any given instant can depend on the entire percept sequence observed to date An agent s behavior is described by the agent function which maps from percept histories to actions: [f: P* A] We can imagine tabulating the agent function that describes any given agent (External characterization) Internally, the agent function will be implemented by an agent program which runs on the physical architecture to produce f agent = architecture + program
6 Rational agents 6 An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful Performance measure: An objective criterion for success of an agent's behavior E.g., performance measure of a vacuum-cleaner agent could be amount of dirt cleaned up, amount of time taken, amount of electricity consumed, amount of noise generated, etc. As a general rule, it is better to design performance measures according to what one actually wants in the environment. Rather than according to how one thinks the agent should behave (amount of dirt cleaned vs a clean floor) A more suitable measure would reward the agent for having a clean floor
7 Rationality 7 What is rational at any given time depends on four things The performance measure that defines the criterion of success The agent s prior knowledge of the environment The actions that the agent can perform The agent s percept sequence to date Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.
8 Vacuum cleaner agent 8 Let s assume the following The performance measure awards one point for each clean square at each time step, over a lifetime of 1000 time steps The geography of the environment is known a priori but the dirt distribution and the initial location of the agent are not. Clean squares stay clean and the sucking cleans the current square. The Left and Right actions move the agent left and right except when this would take the agent outside the environment, in which case the agent remains where it is The only available actions are Left, Right, Suck and NoOp The agent correctly perceives its location and whether that location contains dirt Under these circumstances the agent is rational:its expected performance is at least as high as any other agent s
9 Vacuum cleaner agent 9 Same agent would be irrational under different circumstances once all dirt is cleaned up it will oscillate needlessly back and forth. If the performance measure includes a penalty of one point for each movement left or right, the agent will fare poorly. A better agent for this case would do nothing once it is sure that all the squares are clean. If the clean squares can become dirty again, the agent should occasionally check and clean them if needed. If the geography of the environment is unknown the agent will need to explore it rather than stick to squares A and B
10 Rational agents 10 Rationality is distinct from omniscience (all-knowing with infinite knowledge) Rationality maximizes expected performance while perfection maximizes actual performance Agents can perform actions in order to modify future percepts so as to obtain useful information (information gathering, exploration) An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt)
11 Specifying the task environment (PEAS) 11 PEAS: Performance measure, Environment, Actuators, Sensors In designing an agent, the first step must always be to specify the task environment (PEAS) as fully as possible
12 PEAS for an automated taxi driver 12 Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard
13 PEAS for a medical diagnosis system 13 Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers)
14 PEAS for a satellite image analysis system 14 Performance measure: correct image categorization Environment: downlink from orbiting satellite Actuators: display categorization of scene Sensors: color pixel arrays
15 PEAS for a part-picking robot 15 Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors
16 PEAS for a refinery controller 16 Performance measure: maximize purity, yield, safety Environment: refinery, operators Actuators: valves, pumps, heaters, displays Sensors: temperature, pressure, chemical sensors
17 PEAS for Interactive English tutor 17 Performance measure: Maximize student's score on test Environment: Set of students Actuators: Screen display (exercises, suggestions, corrections) Sensors: Keyboard

18 Applications 18 CS461 Artificial Intelligence Pinar Duygulu Spring 2008
19 Environment types 19 Fully observable vs. partially observable Deterministic vs. stochastic Episodic vs. sequential Static vs. dynamic Discrete vs. continuous Single agent vs. multiagent



20 Environment types 20 Fully observable vs. partially observable: An environment is fully observable if an agent's sensors give it access to the complete state of the environment at each point in time. Fully observable environments are convenient, because the agent need not maintain any internal state to keep track of the world An environment might be partially observable because of noisy and inaccurate sensors or because parts of the state are simply missing from the sensor data Examples: vacuum cleaner with local dirt sensor, taxi driver


21 Environment types 21 Deterministic vs. stochastic: The environment is deterministic if the next state of the environment is completely determined by the current state and the action executed by the agent. In principle, an agent need not worry about uncertainty in a fully observable, deterministic environment If the environment is partially observable then it could appear to be stochastic Examples: Vacuum world is deterministic while taxi driver is not If the environment is deterministic except for the actions of other agents, then the environment is strategic


22 Environment types 22 Episodic vs. sequential: In episodic environments, the agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself. Examples: classification tasks In sequential environments, the current decision could affect all future decisions Examples: chess and taxi driver


23 Environment types 23 Static vs. dynamic: The environment is unchanged while an agent is deliberating. Static environments are easy to deal with because the agent need not keep looking at the world while it is deciding on the action or need it worry about the passage of time Dynamic environments continuously ask the agent what it wants to do The environment is semi-dynamic if the environment itself does not change with the passage of time but the agent's performance score does Examples: taxi driving is dynamic, chess when played with a clock is semi-dynamic, crossword puzzles are static


24 Environment types 24 Discrete vs. continuous: A limited number of distinct, clearly defined states, percepts and actions. Examples: Chess has finite number of discrete states, and has discrete set of percepts and actions. Taxi driving has continuous states, and actions


25 Environment types 25 Single agent vs. multiagent: An agent operating by itself in an environment is single agent Examples: Crossword is a single agent while chess is two-agents Question: Does an agent A have to treat an object B as an agent or can it be treated as a stochastically behaving object Whether B's behaviour is best described by as maximizing a performance measure whose value depends on agent's A behaviour Examples: chess is a competitive multiagent environment while taxi driving is a partially cooperative multiagent environment


26 CS461 Artificial Intelligence Pinar Duygulu Spring
27 Preview of the course 27 Deterministic environments: search, constraint satisfaction, logic Can be sequential or episodic Multi-agent, strategic environments: minimax search, games Can also be stochastic, partially observable Stochastic environments Episodic: Bayesian networks, pattern classifiers Sequential, known: Markov decision processes Sequential, unknown: reinforcement learning
28 Agent functions and programs 28 An agent is completely specified by the agent function mapping percept sequences to actions One agent function (or a small equivalence class) is rational Aim: find a way to implement the rational agent function concisely -> design an agent program Agent = agent program + architecture Architecture: some sort of computing device with physical sensors and actuators (PC, robotic car) should be appropriate: walk action requires legs
29 Agent functions and programs 29 Agent program: Takes the current percept as input from the sensors Return an action to the actuators While agent function takes the whole percept history, agent program takes just the current percept as input which the only available input from the environment The agent need to remember the whole percept sequence, if it needs it
30 Table-lookup agent A trivial agent program: keeps track of the percept sequence and then uses it to index into a table of actions to decide what to do The designers must construct the table that contains the appropriate action for every possible percept sequence 30 function TABLE-DRIVEN-AGENT(percept) returns an action static: percepts, a sequence, initially empty table, a table of actions, indexed by percept sequences, initially fully specified append percept to the end of percepts action <--LOOKUP(percepts, table) return action Drawbacks: Huge table (P^T, P: set of possible percepts, T: lifetime) Space to store the table Take a long time to build the table No autonomy Even with learning, need a long time to learn the table entries
31 Agent types 31 Rather than a table how we can produce rational behavior from a small amount of code Four basic types in order of increasing generality: Simple reflex agents Model-based reflex agents Goal-based agents Utility-based agents
32 Simple reflex agents 32 Select actions on the basis of the current percept ignoring the rest of the percept history Example: simple reflex vacuum cleaner agent function REFLEX-VACUUM-AGENT([location,status]) returns an action if status = Dirty then return Suck else if location = A then return Right else if location = B then return Left Condition-action-rule Example: if car-in-front-is-breaking then initiate-breaking

33 Simple reflex agents 33
34 Simple reflex agents 34 function SIMPLE-REFLEX-AGENT(percept) returns an action static: rules, a set if condition-action rules state <-- INTERPRET_INPUT(percept) rule <-- RULE_MATCH(state, rules) action <-- RULE_ACTION[rule] return action Simple-reflex agents are simple, but they turn out to be of very limited intelligence The agent will work only if the correct decision can be made on the basis of the current percept that is only if the environment is fully observable Infinite loops are often unavoidable escape could be possible by randomizing
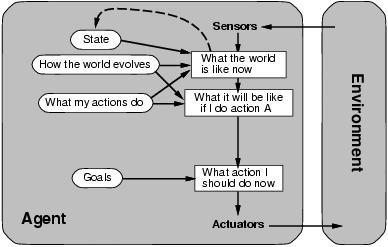
35 Model-based reflex agents 35 The agent should keep track of the part of the world it can't see now The agent should maintain some sort of internal state that depends on the percept history and reflects at least some of the unobserved aspects of the current state Updating the internal state information as time goes by requires two kinds of knowledge to be encoded in the agent program Information about how the world evolves independently of the agent Information about how the agent's own actions affects the world Model of the world model based agents
36 Model-based reflex agents 36
37 Model-based reflex agents 37 function REFLEX-AGENT-WITH-STATE(percept) returns an action static: state, a description of the current world state rules, a set of condition-action rules action, the most recent action, initially none state <-- UPDATE_INPUT(state, action, percept) rule <-- RULE_MATCH(state, rules) action <-- RULE_ACTION[rule] return action
38 Goal-based agents 38 Knowing about the current state of the environment is not always enough to decide what to do (e.g. decision at a road junction) The agent needs some sort of goal information that describes situations that are desirable The agent program can combine this with information about the results of possible actions in order to choose actions that achieve the goal Usually requires search and planning
39 Goal-based agents 39
40 Goal-based agents vs reflex-based agents 40 Although goal-based agents appears less efficient, it is more flexible because the knowledge that supports its decision is represented explicitly and can be modified On the other hand, for the reflex-agent, we would have to rewrite many condition-action rules The goal based agent's behavior can easily be changed The reflex agent's rules must be changed for a new situation
41 Utility-based agents 41 Goals alone are not really enough to generate high quality behavior in most environments they just provide a binary distinction between happy and unhappy states A more general performance measure should allow a comparison of different world states according to exactly how happy they would make the agent if they could be achieved Happy Utility (the quality of being useful) A utility function maps a state onto a real number which describes the associated degree of happiness
42 Utility-based agents 42
43 Learning agents 43 Turing instead of actually programming intelligent machines by hand, which is too much work, build learning machines and then teach them Learning also allows the agent to operate in initially unknown environments and to become more competent than its initial knowledge alone might allow

44 Learning agents 44
45 Learning agents 45 Learning element responsible for making improvements Performance element responsible for selecting external actions (it is what we had defined as the entire agent before) Learning element uses feedback from the critic on how the agent is doing and determines how the performance element should be modified to do better in the future Problem generator is responsible for suggesting actions that will lead to a new and informative experiences
Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents. Outline. Agents. Agents and environments
 Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Outline Intelligent Agents Chapter 2 Source: AI: A Modern Approach, 2 nd Ed Stuart Russell and Peter Norvig Agents and environments Rationality (Performance measure, Environment, Actuators, Sensors) Environment
Chapter 2: Intelligent Agents
 Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Chapter 2: Intelligent Agents Outline Last class, introduced AI and rational agent Today s class, focus on intelligent agents Agent and environments Nature of environments influences agent design Basic
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
CS 331: Artificial Intelligence Intelligent Agents. Agent-Related Terms. Question du Jour. Rationality. General Properties of AI Systems
 General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
General Properties of AI Systems CS 331: Artificial Intelligence Intelligent Agents Sensors Reasoning Actuators Percepts Actions Environmen nt This part is called an agent. Agent: anything that perceives
Artificial Intelligence Agents and Environments 1
 Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Artificial Intelligence and Environments 1 Instructor: Dr. B. John Oommen Chancellor s Professor Fellow: IEEE; Fellow: IAPR School of Computer Science, Carleton University, Canada. 1 The primary source
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An
Agents & Environments Chapter 2. Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell)
") Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Agents & Environments Chapter 2 Mausam (Based on slides of Dan Weld, Dieter Fox, Stuart Russell) Outline Agents and environments Rationality PEAS specification Environment types Agent types D. Weld, D.
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Outline. Chapter 2 Agents & Environments. Agents. Types of Agents: Immobots
 Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Outline Chapter 2 Agents & Environments Agents and environments Rationality PEAS specification Environment types Agent types 2 Agents An agent is anything that can be viewed as perceiving its environment
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Intelligent Agents. CmpE 540 Principles of Artificial Intelligence
 CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
AI: Intelligent Agents. Chapter 2
 AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
Outline for Chapter 2. Agents. Agents. Agents and environments. Vacuum- cleaner world. A vacuum- cleaner agent 8/27/15
 Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
Outline for Chapter 2 Agents Dr. Melanie Mar/n CS 4480 Agents and environments Ra/onality (Performance measure, Environment, Actuators, Sensors) Agent types Agents Agents and environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
22c:145 Artificial Intelligence
 22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
Agents. This course is about designing intelligent agents Agents and environments. Rationality. The vacuum-cleaner world
 This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Lecture 2 Agents & Environments (Chap. 2) Outline
 Outline") Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Rational Agents (Chapter 2)
") Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Rational Agents (Chapter 2) Agents An agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators Example: Vacuum-Agent Percepts:
Intelligent Agents. Russell and Norvig: Chapter 2
 Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Artificial Intelligence Intelligent agents
 Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
Artificial Intelligence Intelligent agents Peter Antal antal@mit.bme.hu A.I. September 11, 2015 1 Agents and environments. The concept of rational behavior. Environment properties. Agent structures. Decision
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Intelligent Agents. Chapter 2
 Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
Intelligent Agents Chapter 2 Outline Agents and environments Rationality Task environment: PEAS: Performance measure Environment Actuators Sensors Environment types Agent types Agents and Environments
Agents. Formalizing Task Environments. What s an agent? The agent and the environment. Environments. Example: the automated taxi driver (PEAS)
") What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
What s an agent? Russell and Norvig: An agent is anything that can be viewed as perceiving its environment through sensors and acting on that environment through actuators. (p. 32) Examples: The agent
Agents. Environments Multi-agent systems. January 18th, Agents
 Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
Plan for the 2nd hour What is an agent? EDA132: Applied Artificial Intelligence (Chapter 2 of AIMA) PEAS (Performance measure, Environment, Actuators, Sensors) Agent architectures. Jacek Malec Dept. of
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents. Philipp Koehn. 16 February 2017
 Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
Intelligent Agents Philipp Koehn 16 February 2017 Agents and Environments 1 Agents include humans, robots, softbots, thermostats, etc. The agent function maps from percept histories to actions: f : P A
What is AI? The science of making machines that: Think rationally. Think like people. Act like people. Act rationally
 What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
What is AI? The science of making machines that: Think like people Think rationally Act like people Act rationally Fundamental question for this lecture (and really this whole AI field!): How do you turn
Agents and State Spaces. CSCI 446: Artificial Intelligence
 Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
Agents and State Spaces CSCI 446: Artificial Intelligence Overview Agents and environments Rationality Agent types Specifying the task environment Performance measure Environment Actuators Sensors Search
KECERDASAN BUATAN 3. By Sirait. Hasanuddin Sirait, MT
 KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
Artificial Intelligence
 Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Artificial Intelligence COMP-241, Level-6 Mohammad Fahim Akhtar, Dr. Mohammad Hasan Department of Computer Science Jazan University, KSA Chapter 2: Intelligent Agents In which we discuss the nature of
Agents and Environments. Stephen G. Ware CSCI 4525 / 5525
 Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
Agents and Environments Stephen G. Ware CSCI 4525 / 5525 Agents An agent (software or hardware) has: Sensors that perceive its environment Actuators that change its environment Environment Sensors Actuators
CS324-Artificial Intelligence
 CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
Agents and Environments
 Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Ar#ficial Intelligence
 Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Ar#ficial Intelligence Lecture 2 Vibhav Gogate The University of Texas at Dallas Some material courtesy of Luke Zettlemoyer, Dan Klein, Dan Weld, Alex Ihler and Stuart Russell Announcements Project 0 is
Solutions for Chapter 2 Intelligent Agents
 Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
Solutions for Chapter 2 Intelligent Agents 2.1 This question tests the student s understanding of environments, rational actions, and performance measures. Any sequential environment in which rewards may
AI Programming CS F-04 Agent Oriented Programming
 AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
Agents. Robert Platt Northeastern University. Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS Seif El-Nasr, CS4100
 Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Agents Robert Platt Northeastern University Some material used from: 1. Russell/Norvig, AIMA 2. Stacy Marsella, CS4100 3. Seif El-Nasr, CS4100 What is an Agent? Sense Agent Environment Act What is an Agent?
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
Rational Agents (Ch. 2) Extra credit! Occasionally we will have in-class activities for extra credit (+3%) You do not need to have a full or correct answer to get credit, but you do need to attempt the
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
Rational Agents (Ch. 2)
") Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Rational Agents (Ch. 2) Rational agent An agent/robot must be able to perceive and interact with the environment A rational agent is one that always takes the best action (possibly expected best) Agent
Agents and State Spaces. CSCI 446: Ar*ficial Intelligence Keith Vertanen
 Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
Agents and State Spaces CSCI 446: Ar*ficial Intelligence Keith Vertanen Overview Agents and environments Ra*onality Agent types Specifying the task environment Performance measure Environment Actuators
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
Silvia Rossi. Agent as Intentional Systems. Lezione n. Corso di Laurea: Informatica. Insegnamento: Sistemi multi-agente.
 Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
Silvia Rossi Agent as Intentional Systems 2 Lezione n. Corso di Laurea: Informatica Insegnamento: Sistemi multi-agente Email: silrossi@unina.it A.A. 2014-2015 Agenti e Ambienti (RN, WS) 2 Environments
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE
 GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
GRUNDZÜGER DER ARTIFICIAL INTELLIGENCE 1. Chapter 1 (Introduction) 1.1. What is AI? The definition of Artificial Intelligence can be grouped in two dimensions: Thinking and Acting. In Figure 1.1 we see
Sequential Decision Making
 Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
Sequential Decision Making Sequential decisions Many (most) real world problems cannot be solved with a single action. Need a longer horizon Ex: Sequential decision problems We start at START and want
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS
 1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
1 What is an Agent? CHAPTER 2: INTELLIGENT AGENTS http://www.csc.liv.ac.uk/ mjw/pubs/imas/ The main point about agents is they are autonomous: capable of acting independently, exhibiting control over their
Definitions. The science of making machines that: This slide deck courtesy of Dan Klein at UC Berkeley
 Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Learning and Adaptive Behavior, Part II
 Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Robotics Summary. Made by: Iskaj Janssen
 Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Robotics Summary Made by: Iskaj Janssen Multiagent system: System composed of multiple agents. Five global computing trends: 1. Ubiquity (computers and intelligence are everywhere) 2. Interconnection (networked
Supplementary notes for lecture 8: Computational modeling of cognitive development
 Supplementary notes for lecture 8: Computational modeling of cognitive development Slide 1 Why computational modeling is important for studying cognitive development. Let s think about how to study the
Supplementary notes for lecture 8: Computational modeling of cognitive development Slide 1 Why computational modeling is important for studying cognitive development. Let s think about how to study the
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
Katsunari Shibata and Tomohiko Kawano
 Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
What is AI? The science of making machines that:
 What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
Reinforcement Learning
 Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Complete a large project that embodies the major course topics Project should be simple but expandable The project should include:
 CSE 466: Course Project Complete a large project that embodies the major course topics Project should be simple but expandable The project should include: Multiple device communication Deal with constrained
CSE 466: Course Project Complete a large project that embodies the major course topics Project should be simple but expandable The project should include: Multiple device communication Deal with constrained
Four Example Application Domains
 Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Four Example Application Domains Autonomous delivery robot roams around an office environment and delivers coffee, parcels,... Diagnostic assistant helps a human troubleshoot problems and suggests repairs
Lecture 13: Finding optimal treatment policies
 MACHINE LEARNING FOR HEALTHCARE 6.S897, HST.S53 Lecture 13: Finding optimal treatment policies Prof. David Sontag MIT EECS, CSAIL, IMES (Thanks to Peter Bodik for slides on reinforcement learning) Outline
MACHINE LEARNING FOR HEALTHCARE 6.S897, HST.S53 Lecture 13: Finding optimal treatment policies Prof. David Sontag MIT EECS, CSAIL, IMES (Thanks to Peter Bodik for slides on reinforcement learning) Outline
Problem Solving Agents
 Problem Solving Agents CSL 302 ARTIFICIAL INTELLIGENCE SPRING 2014 Goal Based Agents Representation Mechanisms (propositional/first order/probabilistic logic) Learning Models Search (blind and informed)
Problem Solving Agents CSL 302 ARTIFICIAL INTELLIGENCE SPRING 2014 Goal Based Agents Representation Mechanisms (propositional/first order/probabilistic logic) Learning Models Search (blind and informed)
Complete a large project that embodies the major course topics Project should be simple but expandable The project should include:
 CSE 466: Course Project Complete a large project that embodies the major course topics Project should be simple but expandable The project should include: Multiple device communication Deal with constrained
CSE 466: Course Project Complete a large project that embodies the major course topics Project should be simple but expandable The project should include: Multiple device communication Deal with constrained
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
PCT 101. A Perceptual Control Theory Primer. Fred Nickols 8/27/2012
 PCT 101 A Perceptual Control Theory Primer Fred Nickols 8/27/2012 This paper presents a simplified, plain language explanation of Perceptual Control Theory (PCT). PCT is a powerful and practical theory
PCT 101 A Perceptual Control Theory Primer Fred Nickols 8/27/2012 This paper presents a simplified, plain language explanation of Perceptual Control Theory (PCT). PCT is a powerful and practical theory
Artificial Intelligence. Outline
 Artificial Intelligence Embodied Intelligence (R. Brooks, MIT) Outline Key perspectives for thinking about how an intelligent system interacts with world Compare mainstream AI to early artificial creature
Artificial Intelligence Embodied Intelligence (R. Brooks, MIT) Outline Key perspectives for thinking about how an intelligent system interacts with world Compare mainstream AI to early artificial creature
A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning
 A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning Azam Rabiee Computer Science and Engineering Isfahan University, Isfahan, Iran azamrabiei@yahoo.com Nasser Ghasem-Aghaee Computer
A Scoring Policy for Simulated Soccer Agents Using Reinforcement Learning Azam Rabiee Computer Science and Engineering Isfahan University, Isfahan, Iran azamrabiei@yahoo.com Nasser Ghasem-Aghaee Computer
ERA: Architectures for Inference
 ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
Towards Learning to Ignore Irrelevant State Variables
 Towards Learning to Ignore Irrelevant State Variables Nicholas K. Jong and Peter Stone Department of Computer Sciences University of Texas at Austin Austin, Texas 78712 {nkj,pstone}@cs.utexas.edu Abstract
Towards Learning to Ignore Irrelevant State Variables Nicholas K. Jong and Peter Stone Department of Computer Sciences University of Texas at Austin Austin, Texas 78712 {nkj,pstone}@cs.utexas.edu Abstract
Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain
 Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain Welcome to the Z-Health Neuroscience Body Hacks Webinar! Because our webinar
Discover Simple Neuroscience Body Hacks that Easily Increase Personal Performance, Accelerate Physical Results and Relieve Pain Welcome to the Z-Health Neuroscience Body Hacks Webinar! Because our webinar
Biologically-Inspired Human Motion Detection
 Biologically-Inspired Human Motion Detection Vijay Laxmi, J. N. Carter and R. I. Damper Image, Speech and Intelligent Systems (ISIS) Research Group Department of Electronics and Computer Science University
Biologically-Inspired Human Motion Detection Vijay Laxmi, J. N. Carter and R. I. Damper Image, Speech and Intelligent Systems (ISIS) Research Group Department of Electronics and Computer Science University
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence
 Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Cognitive Neuroscience History of Neural Networks in Artificial Intelligence The concept of neural network in artificial intelligence To understand the network paradigm also requires examining the history
Introduction to Machine Learning. Katherine Heller Deep Learning Summer School 2018
 Introduction to Machine Learning Katherine Heller Deep Learning Summer School 2018 Outline Kinds of machine learning Linear regression Regularization Bayesian methods Logistic Regression Why we do this
Introduction to Machine Learning Katherine Heller Deep Learning Summer School 2018 Outline Kinds of machine learning Linear regression Regularization Bayesian methods Logistic Regression Why we do this
Reactivity and Deliberation in Decision-Making Systems
 11 Reactivity and Deliberation in Decision-Making Systems Carle Côté 11.1 Introduction 11.2 Let s Begin at the Beginning 11.3 Common Pitfall #1 : One Decision Model to Rule Them All! 11.4 Common Pitfall
11 Reactivity and Deliberation in Decision-Making Systems Carle Côté 11.1 Introduction 11.2 Let s Begin at the Beginning 11.3 Common Pitfall #1 : One Decision Model to Rule Them All! 11.4 Common Pitfall
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement
 ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
ENVIRONMENTAL REINFORCEMENT LEARNING: A Real-time Learning Architecture for Primitive Behavior Refinement TaeHoon Anthony Choi, Eunbin Augustine Yim, and Keith L. Doty Machine Intelligence Laboratory Department
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Artificial Intelligence. Admin.
 15-381 Artificial Intelligence Admin. Instructor: Martial Hebert, NSH 4101, x8-2585 Textbook: Recommended (optional) textbook: Russell and Norvig's "Artificial Intelligence: A Modern Approach (2 nd edition)
15-381 Artificial Intelligence Admin. Instructor: Martial Hebert, NSH 4101, x8-2585 Textbook: Recommended (optional) textbook: Russell and Norvig's "Artificial Intelligence: A Modern Approach (2 nd edition)
Designing Human-like Video Game Synthetic Characters through Machine Consciousness
 Designing Human-like Video Game Synthetic Characters through Machine Consciousness Raúl Arrabales, Agapito Ledezma and Araceli Sanchis Computer Science Department Carlos III University of Madrid http://conscious-robots.com/raul
Designing Human-like Video Game Synthetic Characters through Machine Consciousness Raúl Arrabales, Agapito Ledezma and Araceli Sanchis Computer Science Department Carlos III University of Madrid http://conscious-robots.com/raul
Human Abilities: Vision, Memory and Cognition. Oct 14, 2016
 Human Abilities: Vision, Memory and Cognition Oct 14, 2016 Milestone I How many users? Depends Fall 2016 COMP 3020 2 Midterm True or false Multiple choice Short answer Fall 2016 COMP 3020 3 Midterm sample
Human Abilities: Vision, Memory and Cognition Oct 14, 2016 Milestone I How many users? Depends Fall 2016 COMP 3020 2 Midterm True or false Multiple choice Short answer Fall 2016 COMP 3020 3 Midterm sample
Robot Behavior Genghis, MIT Callisto, GATech
 Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
Robot Behavior Genghis, MIT Callisto, GATech Today s Objectives To learn what robotic behaviors are To obtain a basic understanding of the design approaches related to behavior-based robotic systems To
OPTIC FLOW IN DRIVING SIMULATORS
 OPTIC FLOW IN DRIVING SIMULATORS Ronald R. Mourant, Beverly K. Jaeger, and Yingzi Lin Virtual Environments Laboratory 334 Snell Engineering Center Northeastern University Boston, MA 02115-5000 In the case
OPTIC FLOW IN DRIVING SIMULATORS Ronald R. Mourant, Beverly K. Jaeger, and Yingzi Lin Virtual Environments Laboratory 334 Snell Engineering Center Northeastern University Boston, MA 02115-5000 In the case
Perceptual Anchoring with Indefinite Descriptions
 Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Perceptual Anchoring with Indefinite Descriptions Silvia Coradeschi and Alessandro Saffiotti Center for Applied Autonomous Sensor Systems Örebro University, S-70182 Örebro, Sweden silvia.coradeschi, alessandro.saffiotti
Running Head: VISUAL SCHEDULES FOR STUDENTS WITH AUTISM SPECTRUM DISORDER
 Running Head: VISUAL SCHEDULES FOR STUDENTS WITH AUTISM SPECTRUM DISORDER Visual Schedules for Students with Autism Spectrum Disorder Taylor Herback 200309600 University of Regina VISUAL SCHEDULES FOR
Running Head: VISUAL SCHEDULES FOR STUDENTS WITH AUTISM SPECTRUM DISORDER Visual Schedules for Students with Autism Spectrum Disorder Taylor Herback 200309600 University of Regina VISUAL SCHEDULES FOR