Introduction to Deep Reinforcement Learning and Control
|
|
|
- Winifred Horton
- 6 years ago
- Views:
Transcription
1 Carnegie Mellon School of Computer Science Deep Reinforcement Learning and Control Introduction to Deep Reinforcement Learning and Control Lecture 1, CMU Katerina Fragkiadaki
2 Logistics 3 assignments and a project Russ will announce those in the next lecture!

3 Goal of the Course How to build agents that learn behaviors in a dynamic world? as opposed to agents that execute preprogrammed behavior in a static world Behavior: a sequence of actions with a particular goal

4 Behaviors are Important The brain evolved, not to think or feel, but to control movement. Daniel Wolpert, nice TED talk

5 Behaviors are Important The brain evolved, not to think or feel, but to control movement. Daniel Wolpert, nice TED talk Sea squirts digest their own brain when they decide not to move anymore
6 Behaviors are Important The brain evolved, not to think or feel, but to control movement. Daniel Wolpert, nice TED talk Learning behaviors that adapt to a changing environment is considered the hallmark of human intelligence (though definitions of intelligence are not easy)
7 Learning Behaviors Learning to map sequences of observations to actions
8 Learning Behaviors Learning to map sequences of observations to actions, for a particular goal goal g t
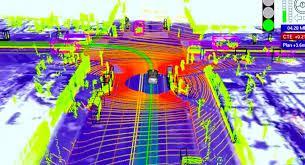
9 Supervision What supervision does an agent need to learn purposeful behaviors in dynamic environments? Rewards: sparse feedback from the environment whether the desired behavior is achieved e.g., game is won, car has not crashed, agent is out of the maze etc. Demonstrations: experts demonstrate the desired behavior, e.g. by kinesthetic teaching, teleoperation, or through visual imitation (e.g., instructional youtube videos) Specifications/Attributes of good behavior: e.g., for driving such attributes would be respect the lane, keep adequate distance from the front car, etc. DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving, Chen at al.


10 Behavior: High Jump scissors Fosbury flop 1. Learning from rewards Reward: jump as high as possible: It took years for athletes to find the right behavior to achieve this 2. Learns from demonstrations It was way easier for athletes to perfection the jump, once someone showed the right general trajectory 3. Learns from specifications of optimal behavior For novices, it is much easier to replicate this behavior if additional guidance is provided based on specifications: where to place the foot, how to time yourself etc.

11 Learning Behaviors How learning behaviors is different than other machine learning paradigms, e.g., learning to detect objects in images?
12 Learning Behaviors How learning behaviors is different than other machine learning paradigms? The agent s actions affect the data she will receive in the future
13
14 Learning Behaviors How learning behaviors is different than other machine learning paradigms? The agent s actions affect the data she will receive in the future: The data the agent receives are sequential in nature, not i.i.d. Standard supervised learning approaches lead to compounding errors, An invitation to imitation, Drew Bagnell
15 Learning to Drive a Car: Supervised Learning
16 Learning to Drive a Car: Supervised Learning
17 Learning to Race a Car : Interactive learning-dagger

18 Learning to Race a Car : Interactive learning-dagger This assumes you can actively access an expert during training! A Reduction of Imitation Learning and Structured Prediction to No-Regret Online Learning Stephane Ross, Geoffrey J. Gordon, J. Andrew Bagnell
19 Learning to Drive a Car: Supervised Learning Policy network : mapping of observations to actions
20 Learning Behaviors How learning behaviors is different than other machine learning paradigms? 1) The agent s actions affect the data she will receive in the future 2) The reward (whether the goal of the behavior is achieved) is far in the future
21 Learning Behaviors How learning behaviors is different than other machine learning paradigms? 1) The agent s actions affect the data she will receive in the future 2) The reward (whether the goal of the behavior is achieved) is far in the future: Temporal credit assignment: which actions were important and which were not, is hard to know
22 Learning Behaviors How learning behaviors is different than other machine learning paradigms? 1) The agent s actions affect the data she will receive in the future 2) The reward (whether the goal of the behavior is achieved) is far in the future: 3) Actions take time to carry out in the real world, and thus this may limit the amount of experience
23 Learning Behaviors How learning behaviors is different than other machine learning paradigms? 1) The agent s actions affect the data she will receive in the future 2) The reward (whether the goal of the behavior is achieved) is far in the future: 3) Actions take time to carry out in the real world, and thus this may limit the amount of experience We can use simulated experience and tackle the sim2real transfer We can buy many robots
24 Supersizing Self-Supervision Supersizing Self-supervision: Learning to Grasp from 50K Tries and 700 Robot Hours, Pinto and Gupta

25 Google s Robot Farm
26 Successes of behavior learning


27 Backgammon High branching factor due to dice roll prohibits brute force deep searches such as in chess


28 Backgammon TD-Gammon Neuro-Gammon Developed by Gerarl Tesauro in 1992 in IBM s research center
29 Backgammon TD-Gammon Neuro-Gammon Temporal Difference learning Developed by Gerarl Tesauro in 1992 in IBM s research center A neural network that trains itself to be an evaluation function by playing against itself starting from random weights Using features from Neuro-gammon it beat the world s champions Learning from human experts, supervised learning
30 Backgammon TD-Gammon Temporal Difference learning Developed by Gerarl Tesauro in 1992 in IBM s research center A neural network that trains itself to be an evaluation function by playing against itself starting from random weights Using features from Neuro-gammon it beat the world s champions There is no question that its positional judgement is far better than mine. Its technique is less than perfect is such things as building up a board without opposing contact when the human can often come up with a better play by calculating it out. Kit Woolsey
31 Locomotion Optimization and learning for rough terrain legged locomotion, Zucker et al.






32 Self-Driving Cars
 ALVINN (Autonomous Land Vehicle In a")
33 Self-Driving Cars Pomerleau: Behavior Cloning: data augmentation to deal with compounding errors, online adaptation (interactive learning) ALVINN (Autonomous Land Vehicle In a Neural Network), Efficient Training of Artificial Neural Networks for Autonomous Navigation, Pomerleau 1991

34 Self-Driving Cars Pomerleau: Computer Vision, Velodyne sensors, object detection, 3D pose estimation, trajectory prediction
35 Atari Deep Mind Deep Q learning
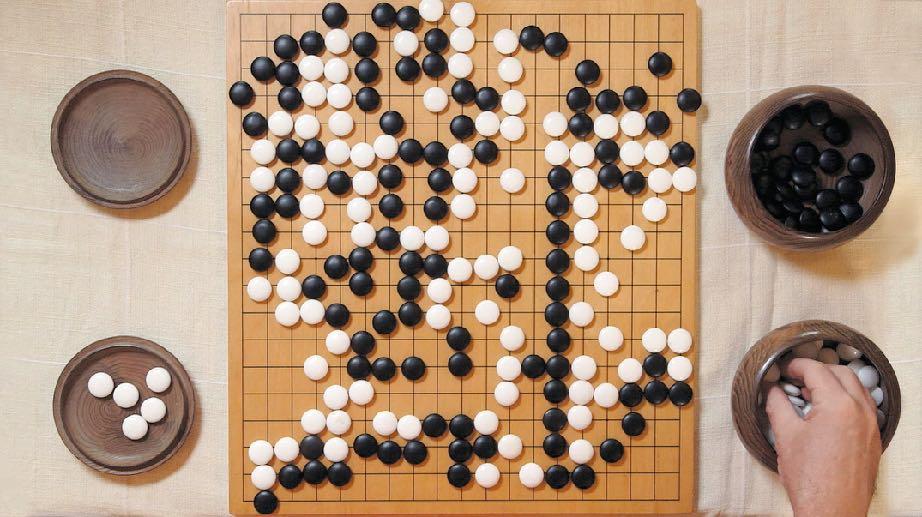
36 GO
37 AlphaGo Monte Carlo Tree Search, learning policy and value function networks for pruning the search tree, trained from expert demonstrations, self play
38 AlphaGo Policy net trained to mimic expert moves, and then finetuned using self-play Monte Carlo Tree Search, learning policy and value function networks for pruning the search tree, trained from expert demonstrations, self play
39 AlphaGo Policy net trained to mimic expert moves, and then finetuned using self-play Value network trained with regression to predict the outcome, using self play data of the best policy. Monte Carlo Tree Search, learning policy and value function networks for pruning the search tree, trained from expert demonstrations, self play

40 AlphaGo Policy net trained to mimic expert moves, and then finetuned using self-play Value network trained with regression to predict the outcome, using self play data of the best policy. At test time, policy and value nets guide a MCTS to select stronger moves by deep look ahead. Monte Carlo Tree Search, learning policy and value function networks for pruning the search tree, trained from expert demonstrations, self play

41 AlphaGo Monte Carlo Tree Search, learning policy and value function networks for pruning the search tree, expert demonstrations, self play, Tensor Processing Unit


42 AlphaGo Tensor Processing Unit from Google
43 AlphaGoZero No human supervision! MCTS to select great moves during training and testing!
44 AlphaGoZero
45 AlphaGoZero
46 AlphaGoZero
47 AlphaGoZero
48 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse 3. Discrete Vs Continuous actions 4. One goal Vs many goals 5. Rewards automatic VS rewards need themselves to be detected
49 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse
50 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse State estimation: To be able to act you need first to be able to see, detect the objects that you interact with, detect whether you achieved your goal
, they use planners to search for the action sequence to achieve a desired goal. Rearrangement Planning via Heuristic Search, Jennifer E. King, Siddhartha S.")
51 State estimation Most works are between two extremes: Assuming the world model known (object locations, shapes, physical properties obtain via AR tags or manual tuning), they use planners to search for the action sequence to achieve a desired goal. Rearrangement Planning via Heuristic Search, Jennifer E. King, Siddhartha S. Srinivasa

52 State estimation Most works are between two extremes: Assuming the world model known (object locations, shapes, physical properties obtain via AR tags or manual tuning), they use planners to search for the action sequence to achieve a desired goal. Do not attempt to detect any objects and learn to map RGB images directly to actions End to End Learning for Self-Driving Cars, NVIDIA
53 State estimation Recent works have shown that to be able to transfer behaviors across environment variations, factorization of the world state in terms of entities, their attributes and their dynamics are important!
54 State estimation Recent works have shown that to be able to transfer behaviors across environment variations, factorization of the world state in terms of entities, their attributes and their dynamics are important! They assume perfect entity/attribute detection and attempt to learn the dynamics of the game.

55 State estimation Recent works have shown that to be able to transfer behaviors across environment variations, factorization of the world state in terms of entities, their attributes and their dynamics are important! They assume perfect entity/attribute detection and attempt to learn the dynamics of the game. They infer actions by chaining dynamics forward to achieve desired goals.
56 State estimation Recent works have shown that to be able to transfer behaviors across environment variations, factorization of the world state in terms of entities, their attributes and their dynamics are important! Schema Nets can handle the environmental variation, since dynamics do not change (only the entities). Thus, structured state representations in terms of objects, attributes are important.
.")
57 State estimation Recent works have shown that to be able to transfer behaviors across environment variations, factorization of the world state in terms of entities, their attributes and their dynamics are important! Schema Nets can handle the environmental variation, since dynamics do not change (only the entities). Thus, structured state representations in terms of objects, attributes are important. Therefore, behavior learning is difficult because state estimation is difficult, in other words, because Computer Vision is difficult.
58 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse 3. Discrete Vs Continuous actions 4. One goal Vs many goals 5. Rewards automatic VS rewards need themselves to be detected
59 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse 3. Discrete Vs Continuous actions (curriculum learning, progressively add degrees of freedom) 4. One goal Vs many goals 5. Rewards automatic VS rewards need themselves to be detected
60 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse 3. Discrete Vs Continuous actions (curriculum learning, progressively add degrees of freedom) 4. One goal Vs many goals (generalized policies parametrized by the goal, Hindsight Experience Replay) 5. Rewards automatic VS rewards need themselves to be detected
61 Alpha Go Versus the real world How the world of Alpha Go is different than the real world? 1. Known environment (known entities and dynamics) Vs Unknown environment (unknown entities and dynamics). 2. Need for behaviors to transfer across environmental variations since the real world is very diverse 3. Discrete Vs Continuous actions (curriculum learning, progressively add degrees of freedom) 4. One goal Vs many goals (generalized policies parametrized by the goal, Hindsight Experience Replay) 5. Rewards automatic VS rewards need themselves to be detected (learning perceptual rewards, use Computer Vision to detect success)
62 Learning Behaviors in the Real World Be multi-modal Be incremental Be physical Explore Be social Learn a language The Development of Embodied Cognition: Six Lessons from Babies Linda Smith, Michael Gasser
CS343: Artificial Intelligence
 CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
CS343: Artificial Intelligence Introduction: Part 2 Prof. Scott Niekum University of Texas at Austin [Based on slides created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All materials
Reinforcement Learning
 Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
Reinforcement Learning Michèle Sebag ; TP : Herilalaina Rakotoarison TAO, CNRS INRIA Université Paris-Sud Nov. 9h, 28 Credit for slides: Richard Sutton, Freek Stulp, Olivier Pietquin / 44 Introduction
Artificial Intelligence Lecture 7
 Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Artificial Intelligence Lecture 7 Lecture plan AI in general (ch. 1) Search based AI (ch. 4) search, games, planning, optimization Agents (ch. 8) applied AI techniques in robots, software agents,... Knowledge
Intelligent Machines That Act Rationally. Hang Li Bytedance AI Lab
 Intelligent Machines That Act Rationally Hang Li Bytedance AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly
Intelligent Machines That Act Rationally Hang Li Bytedance AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly
M.Sc. in Cognitive Systems. Model Curriculum
 M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
M.Sc. in Cognitive Systems Model Curriculum April 2014 Version 1.0 School of Informatics University of Skövde Sweden Contents 1 CORE COURSES...1 2 ELECTIVE COURSES...1 3 OUTLINE COURSE SYLLABI...2 Page
Module 1. Introduction. Version 1 CSE IIT, Kharagpur
 Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Module 1 Introduction Lesson 2 Introduction to Agent 1.3.1 Introduction to Agents An agent acts in an environment. Percepts Agent Environment Actions An agent perceives its environment through sensors.
Intelligent Machines That Act Rationally. Hang Li Toutiao AI Lab
 Intelligent Machines That Act Rationally Hang Li Toutiao AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly Thinking
Intelligent Machines That Act Rationally Hang Li Toutiao AI Lab Four Definitions of Artificial Intelligence Building intelligent machines (i.e., intelligent computers) Thinking humanly Acting humanly Thinking
Chapter 1. Give an overview of the whole RL problem. Policies Value functions. Tic-Tac-Toe example
 Chapter 1 Give an overview of the whole RL problem n Before we break it up into parts to study individually Introduce the cast of characters n Experience (reward) n n Policies Value functions n Models
Chapter 1 Give an overview of the whole RL problem n Before we break it up into parts to study individually Introduce the cast of characters n Experience (reward) n n Policies Value functions n Models
Introduction to Artificial Intelligence 2 nd semester 2016/2017. Chapter 2: Intelligent Agents
 Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Introduction to Artificial Intelligence 2 nd semester 2016/2017 Chapter 2: Intelligent Agents Mohamed B. Abubaker Palestine Technical College Deir El-Balah 1 Agents and Environments An agent is anything
Lecture 17: The Cognitive Approach
 Lecture 17: The Cognitive Approach I. INTRODUCTION A. Thought Experiment What would happen if aliens landed on Earth? How would we try to understand them? What kind of information would we have What kind
Lecture 17: The Cognitive Approach I. INTRODUCTION A. Thought Experiment What would happen if aliens landed on Earth? How would we try to understand them? What kind of information would we have What kind
Artificial Intelligence
 Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
Artificial Intelligence Intelligent Agents Chapter 2 & 27 What is an Agent? An intelligent agent perceives its environment with sensors and acts upon that environment through actuators 2 Examples of Agents
RJT. Pupil Task Cards: Jumping JUMP THROW RUN
 RJT s: Jumping RUN JUMP THROW s: Introduction Introduction to the s An important part of every child s cognitive development is to encourage them to explore new things and use self-guided learning to problem-solve
RJT s: Jumping RUN JUMP THROW s: Introduction Introduction to the s An important part of every child s cognitive development is to encourage them to explore new things and use self-guided learning to problem-solve
Lecture 2 Agents & Environments (Chap. 2) Outline
 Outline") Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Lecture 2 Agents & Environments (Chap. 2) Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew Moore Outline Agents and environments Rationality PEAS specification Environment types
Agents and Environments
 Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Agents and Environments Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 2 AI 2004 Berlin Chen 1 What is an Agent An agent interacts with its
Lecture 13: Finding optimal treatment policies
 MACHINE LEARNING FOR HEALTHCARE 6.S897, HST.S53 Lecture 13: Finding optimal treatment policies Prof. David Sontag MIT EECS, CSAIL, IMES (Thanks to Peter Bodik for slides on reinforcement learning) Outline
MACHINE LEARNING FOR HEALTHCARE 6.S897, HST.S53 Lecture 13: Finding optimal treatment policies Prof. David Sontag MIT EECS, CSAIL, IMES (Thanks to Peter Bodik for slides on reinforcement learning) Outline
CS 771 Artificial Intelligence. Intelligent Agents
 CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
CS 771 Artificial Intelligence Intelligent Agents What is AI? Views of AI fall into four categories 1. Thinking humanly 2. Acting humanly 3. Thinking rationally 4. Acting rationally Acting/Thinking Humanly/Rationally
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions. Dr Terry R. Payne Department of Computer Science
 COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
COMP329 Robotics and Autonomous Systems Lecture 15: Agents and Intentions Dr Terry R. Payne Department of Computer Science General control architecture Localisation Environment Model Local Map Position
 PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
PART - A 1. Define Artificial Intelligence formulated by Haugeland. The exciting new effort to make computers think machines with minds in the full and literal sense. 2. Define Artificial Intelligence
Intelligent Agents. CmpE 540 Principles of Artificial Intelligence
 CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
CmpE 540 Principles of Artificial Intelligence Intelligent Agents Pınar Yolum pinar.yolum@boun.edu.tr Department of Computer Engineering Boğaziçi University 1 Chapter 2 (Based mostly on the course slides
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 2. Rational Agents Nature and Structure of Rational Agents and Their Environments Wolfram Burgard, Bernhard Nebel and Martin Riedmiller Albert-Ludwigs-Universität
Agents and Environments
 Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Artificial Intelligence Programming s and s Chris Brooks 3-2: Overview What makes an agent? Defining an environment Types of agent programs 3-3: Overview What makes an agent? Defining an environment Types
Introduction to Machine Learning. Katherine Heller Deep Learning Summer School 2018
 Introduction to Machine Learning Katherine Heller Deep Learning Summer School 2018 Outline Kinds of machine learning Linear regression Regularization Bayesian methods Logistic Regression Why we do this
Introduction to Machine Learning Katherine Heller Deep Learning Summer School 2018 Outline Kinds of machine learning Linear regression Regularization Bayesian methods Logistic Regression Why we do this
Contents. Foundations of Artificial Intelligence. Agents. Rational Agents
 Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
Contents Foundations of Artificial Intelligence 2. Rational s Nature and Structure of Rational s and Their s Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität Freiburg May
What is Artificial Intelligence? A definition of Artificial Intelligence. Systems that act like humans. Notes
 What is? It is a young area of science (1956) Its goals are what we consider Intelligent behaviour There are many approaches from different points of view It has received influence from very diverse areas
What is? It is a young area of science (1956) Its goals are what we consider Intelligent behaviour There are many approaches from different points of view It has received influence from very diverse areas
22c:145 Artificial Intelligence
 22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
22c:145 Artificial Intelligence Fall 2005 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2001-05 Cesare Tinelli and Hantao Zhang. a a These notes are copyrighted material and may not
EEL-5840 Elements of {Artificial} Machine Intelligence
 Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
Menu Introduction Syllabus Grading: Last 2 Yrs Class Average 3.55; {3.7 Fall 2012 w/24 students & 3.45 Fall 2013} General Comments Copyright Dr. A. Antonio Arroyo Page 2 vs. Artificial Intelligence? DEF:
AI Programming CS F-04 Agent Oriented Programming
 AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
AI Programming CS662-2008F-04 Agent Oriented Programming David Galles Department of Computer Science University of San Francisco 04-0: Agents & Environments What is an Agent What is an Environment Types
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3) INTELLIGENT AGENTS (Course coordinator) CHAPTER OUTLINE What
Cost-sensitive Dynamic Feature Selection
 Cost-sensitive Dynamic Feature Selection He He 1, Hal Daumé III 1 and Jason Eisner 2 1 University of Maryland, College Park 2 Johns Hopkins University June 30, 2012 He He, Hal Daumé III and Jason Eisner
Cost-sensitive Dynamic Feature Selection He He 1, Hal Daumé III 1 and Jason Eisner 2 1 University of Maryland, College Park 2 Johns Hopkins University June 30, 2012 He He, Hal Daumé III and Jason Eisner
Reinforcement Learning and Artificial Intelligence
 Reinforcement Learning and Artificial Intelligence PIs: Rich Sutton Michael Bowling Dale Schuurmans Vadim Bulitko plus: Dale Schuurmans Vadim Bulitko Lori Troop Mark Lee Reinforcement learning is learning
Reinforcement Learning and Artificial Intelligence PIs: Rich Sutton Michael Bowling Dale Schuurmans Vadim Bulitko plus: Dale Schuurmans Vadim Bulitko Lori Troop Mark Lee Reinforcement learning is learning
Learning and Adaptive Behavior, Part II
 Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Learning and Adaptive Behavior, Part II April 12, 2007 The man who sets out to carry a cat by its tail learns something that will always be useful and which will never grow dim or doubtful. -- Mark Twain
Learning Utility for Behavior Acquisition and Intention Inference of Other Agent
 Learning Utility for Behavior Acquisition and Intention Inference of Other Agent Yasutake Takahashi, Teruyasu Kawamata, and Minoru Asada* Dept. of Adaptive Machine Systems, Graduate School of Engineering,
Learning Utility for Behavior Acquisition and Intention Inference of Other Agent Yasutake Takahashi, Teruyasu Kawamata, and Minoru Asada* Dept. of Adaptive Machine Systems, Graduate School of Engineering,
CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures. Instructor: Chad Jenkins (cjenkins)
") Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
Lecture 5 Control Architectures Slide 1 CS148 - Building Intelligent Robots Lecture 5: Autonomus Control Architectures Instructor: Chad Jenkins (cjenkins) Lecture 5 Control Architectures Slide 2 Administrivia
CS324-Artificial Intelligence
 CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
CS324-Artificial Intelligence Lecture 3: Intelligent Agents Waheed Noor Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan Waheed Noor (CS&IT, UoB, Quetta) CS324-Artificial
GYMNASTICS YEAR 1 WEEK 5
 GYMNASTICS YEAR 1 To link two ways of travelling, eg walking backwards safely and a roll, to make a short movement phrase. To remember and perform a short movement phrase. To know where you start and finish
GYMNASTICS YEAR 1 To link two ways of travelling, eg walking backwards safely and a roll, to make a short movement phrase. To remember and perform a short movement phrase. To know where you start and finish
KECERDASAN BUATAN 3. By Sirait. Hasanuddin Sirait, MT
 KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
KECERDASAN BUATAN 3 By @Ir.Hasanuddin@ Sirait Why study AI Cognitive Science: As a way to understand how natural minds and mental phenomena work e.g., visual perception, memory, learning, language, etc.
AI: Intelligent Agents. Chapter 2
 AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
AI: Intelligent Agents Chapter 2 Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything
Competing Frameworks in Perception
 Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception
 Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Competing Frameworks in Perception Lesson II: Perception module 08 Perception.08. 1 Views on perception Perception as a cascade of information processing stages From sensation to percept Template vs. feature
Overview. What is an agent?
 Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Artificial Intelligence Programming s and s Chris Brooks Overview What makes an agent? Defining an environment Overview What makes an agent? Defining an environment Department of Computer Science University
Unmanned autonomous vehicles in air land and sea
 based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
based on Gianni A. Di Caro lecture on ROBOT CONTROL RCHITECTURES SINGLE AND MULTI-ROBOT SYSTEMS: A CASE STUDY IN SWARM ROBOTICS Unmanned autonomous vehicles in air land and sea Robots and Unmanned Vehicles
Robotic Dancing: Exploring Agents that use a Stratified Perceive- Decide-Act Cycle of Interaction
 Robotic Dancing: Exploring Agents that use a Stratified Perceive- Decide-Act Cycle of Interaction James Benze and Jennifer Seitzer Department of Computer Science University of Dayton, Dayton, OH 45469-2160
Robotic Dancing: Exploring Agents that use a Stratified Perceive- Decide-Act Cycle of Interaction James Benze and Jennifer Seitzer Department of Computer Science University of Dayton, Dayton, OH 45469-2160
Lecture 6. Perceptual and Motor Schemas
 CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
CS564 - Brain Theory and Artificial Intelligence Lecture 6. Perceptual and Motor Reading Assignments: TMB2:* Sections 2.1, 2.2, 5.1 and 5.2. HBTNN: Schema Theory (Arbib) [Also required] Distributed Artificial
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
ERA: Architectures for Inference
 ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
ERA: Architectures for Inference Dan Hammerstrom Electrical And Computer Engineering 7/28/09 1 Intelligent Computing In spite of the transistor bounty of Moore s law, there is a large class of problems
Behavior Architectures
 Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
Behavior Architectures 5 min reflection You ve read about two very different behavior architectures. What are the most significant functional/design differences between the two approaches? Are they compatible
AGENT-BASED SYSTEMS. What is an agent? ROBOTICS AND AUTONOMOUS SYSTEMS. Today. that environment in order to meet its delegated objectives.
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 16 comp329-2013-parsons-lect16 2/44 Today We will start on the second part of the course Autonomous
Intelligent Agents. Russell and Norvig: Chapter 2
 Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Intelligent Agents Russell and Norvig: Chapter 2 Intelligent Agent? sensors agent actuators percepts actions environment Definition: An intelligent agent perceives its environment via sensors and acts
Planning a Fitness Program. Chapter 3 Lesson 3
 Planning a Fitness Program Chapter 3 Lesson 3 Planning a Fitness Program If you ve started and stopped fitness programs in the past, take some time to assess why you stopped and what changes you need to
Planning a Fitness Program Chapter 3 Lesson 3 Planning a Fitness Program If you ve started and stopped fitness programs in the past, take some time to assess why you stopped and what changes you need to
Dr. Mustafa Jarrar. Chapter 2 Intelligent Agents. Sina Institute, University of Birzeit
 Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Lecture Notes, Advanced Artificial Intelligence (SCOM7341) Sina Institute, University of Birzeit 2 nd Semester, 2012 Advanced Artificial Intelligence (SCOM7341) Chapter 2 Intelligent Agents Dr. Mustafa
Agents. This course is about designing intelligent agents Agents and environments. Rationality. The vacuum-cleaner world
 This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
This course is about designing intelligent agents and environments Rationality The vacuum-cleaner world The concept of rational behavior. Environment types Agent types 1 An agent is an entity that perceives
Intelligent Agents. Instructor: Tsung-Che Chiang
 Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Intelligent Agents Instructor: Tsung-Che Chiang tcchiang@ieee.org Department of Computer Science and Information Engineering National Taiwan Normal University Artificial Intelligence, Spring, 2010 Outline
Artificial Intelligence. Intelligent Agents
 Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence Intelligent Agents Agent Agent is anything that perceives its environment through sensors and acts upon that environment through effectors. Another definition later (Minsky) Humans
Artificial Intelligence CS 6364
 Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Artificial Intelligence CS 6364 Professor Dan Moldovan Section 2 Intelligent Agents Intelligent Agents An agent is a thing (e.g. program, or system) that can be viewed as perceiving its environment and
Bayesian Perception & Decision for Intelligent Mobility
 Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Bayesian Perception & Decision for Intelligent Mobility E-Motion & Chroma teams Inria Research Center Grenoble Rhône-Alpes Christian LAUGIER First Class Research Director at Inria San Francisco, 05/11/2015
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Karsten Martiny (Übungen) Literature Chapters 2, 6, 13, 15-17
neurons: how kids learn
 mirror neurons: how kids learn Table of Contents 1 2 mirror neurons The Neuron What is a Mirror Neuron Research language development Mimicry Mapping 3 actions and intentions Understanding Intentions 4
mirror neurons: how kids learn Table of Contents 1 2 mirror neurons The Neuron What is a Mirror Neuron Research language development Mimicry Mapping 3 actions and intentions Understanding Intentions 4
Intelligent Agents. Chapter 2 ICS 171, Fall 2009
 Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
Intelligent Agents Chapter 2 ICS 171, Fall 2009 Discussion \\Why is the Chinese room argument impractical and how would we have to change the Turing test so that it is not subject to this criticism? Godel
PHYSIOLOGICAL RESEARCH
 DOMAIN STUDIES PHYSIOLOGICAL RESEARCH In order to understand the current landscape of psychophysiological evaluation methods, we conducted a survey of academic literature. We explored several different
DOMAIN STUDIES PHYSIOLOGICAL RESEARCH In order to understand the current landscape of psychophysiological evaluation methods, we conducted a survey of academic literature. We explored several different
Machine Learning and Event Detection for the Public Good
 Machine Learning and Event Detection for the Public Good Daniel B. Neill, Ph.D. H.J. Heinz III College Carnegie Mellon University E-mail: neill@cs.cmu.edu We gratefully acknowledge funding support from
Machine Learning and Event Detection for the Public Good Daniel B. Neill, Ph.D. H.J. Heinz III College Carnegie Mellon University E-mail: neill@cs.cmu.edu We gratefully acknowledge funding support from
6/19/18. What Is Growth Mindset? Growth Mindset and Development. Historically, we have tried to change behavior from the outside:
 Growth Mindset and Development Boston After School & Beyond 2018 ACT Skills Summit Caitlin McCormick, M.Ed. Sr. Manager of Training & Coaching What Is Growth Mindset Historically, we have tried to change
Growth Mindset and Development Boston After School & Beyond 2018 ACT Skills Summit Caitlin McCormick, M.Ed. Sr. Manager of Training & Coaching What Is Growth Mindset Historically, we have tried to change
Definitions. The science of making machines that: This slide deck courtesy of Dan Klein at UC Berkeley
 Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Definitions The science of making machines that: Think like humans Think rationally Act like humans Act rationally This slide deck courtesy of Dan Klein at UC Berkeley Acting Like Humans? Turing (1950)
Pavlovian, Skinner and other behaviourists contribution to AI
 Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Pavlovian, Skinner and other behaviourists contribution to AI Witold KOSIŃSKI Dominika ZACZEK-CHRZANOWSKA Polish Japanese Institute of Information Technology, Research Center Polsko Japońska Wyższa Szko
Dynamic Rule-based Agent
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 4 (2018), pp. 605-613 International Research Publication House http://www.irphouse.com Dynamic Rule-based
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 4 (2018), pp. 605-613 International Research Publication House http://www.irphouse.com Dynamic Rule-based
What is AI? The science of making machines that:
 What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
What is AI? The science of making machines that: Think like humans Think rationally Act like humans Act rationally Thinking Like Humans? The cognitive science approach: 1960s ``cognitive revolution'':
Stress Management & Mental Health Enhancement
 Stress Management & Mental Health Enhancement Jack Veitch Health Promoter & Educator Canadian Mental Health Association HKPR @CMHAEducation Purpose To gain a better understanding of what stress is and
Stress Management & Mental Health Enhancement Jack Veitch Health Promoter & Educator Canadian Mental Health Association HKPR @CMHAEducation Purpose To gain a better understanding of what stress is and
Introduction to affect computing and its applications
 Introduction to affect computing and its applications Overview What is emotion? What is affective computing + examples? Why is affective computing useful? How do we do affect computing? Some interesting
Introduction to affect computing and its applications Overview What is emotion? What is affective computing + examples? Why is affective computing useful? How do we do affect computing? Some interesting
Section 2 8. Section 2. Instructions How To Get The Most From This Program Dr. Larry Van Such.
 Section 2 8 Section 2 Instructions How To Get The Most From This Program Section 2 9 INSTRUCTIONS To ensure the greatest amount of your success with this program please read through this section very carefully
Section 2 8 Section 2 Instructions How To Get The Most From This Program Section 2 9 INSTRUCTIONS To ensure the greatest amount of your success with this program please read through this section very carefully
Artificial Cognitive Systems
 Artificial Cognitive Systems David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Artificial Cognitive Systems 1 Carnegie Mellon University Africa Lecture 2 Paradigms of Cognitive
Artificial Cognitive Systems David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Artificial Cognitive Systems 1 Carnegie Mellon University Africa Lecture 2 Paradigms of Cognitive
What is Self-Esteem? Why is it Important? Where Does Self-Esteem Come From? How Can You Boost Self-Esteem?
 What is Self-Esteem? Why is it Important? Where Does Self-Esteem Come From? How Can You Boost Self-Esteem? This learning package focuses on teaching students key information about self-esteem. Students
What is Self-Esteem? Why is it Important? Where Does Self-Esteem Come From? How Can You Boost Self-Esteem? This learning package focuses on teaching students key information about self-esteem. Students
Bayesian Networks Representation. Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University
 Bayesian Networks Representation Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University March 16 th, 2005 Handwriting recognition Character recognition, e.g., kernel SVMs r r r a c r rr
Bayesian Networks Representation Machine Learning 10701/15781 Carlos Guestrin Carnegie Mellon University March 16 th, 2005 Handwriting recognition Character recognition, e.g., kernel SVMs r r r a c r rr
CHAPTER 6: Memory model Practice questions at - text book pages 112 to 113
 QUESTIONS AND ANSWERS QUESTIONS AND ANSWERS CHAPTER 6: Memory model Practice questions at - text book pages 112 to 113 1) Which of the following sequences reflects the order in which the human brain processes
QUESTIONS AND ANSWERS QUESTIONS AND ANSWERS CHAPTER 6: Memory model Practice questions at - text book pages 112 to 113 1) Which of the following sequences reflects the order in which the human brain processes
Intelligent Agents. Soleymani. Artificial Intelligence: A Modern Approach, Chapter 2
 Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Intelligent Agents CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 2 Outline Agents and environments
Technical and Tactical Discussion October Sasha Rearick
 Technical and Tactical Discussion October 2018 Sasha Rearick Skills of Successful WC skiers Tactical Skills Pressure in the fall line Direct path of CM Reduce drag Rhythm and Timing Mental skills to Perform
Technical and Tactical Discussion October 2018 Sasha Rearick Skills of Successful WC skiers Tactical Skills Pressure in the fall line Direct path of CM Reduce drag Rhythm and Timing Mental skills to Perform
Katsunari Shibata and Tomohiko Kawano
 Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
Learning of Action Generation from Raw Camera Images in a Real-World-Like Environment by Simple Coupling of Reinforcement Learning and a Neural Network Katsunari Shibata and Tomohiko Kawano Oita University,
Developing Your Intuition
 EFT Personal Developments Inc. Presents Developing Your Intuition With Clara Penner Introduction to your Intuition You can see, hear, touch, smell and taste... But are you in touch with your intuitive
EFT Personal Developments Inc. Presents Developing Your Intuition With Clara Penner Introduction to your Intuition You can see, hear, touch, smell and taste... But are you in touch with your intuitive
The Horizontal Jumps: Approach Run
 Nick Newman, MS The Horizontal Jumps: Approach Run To an untrained eye it appears that horizontal jumpers simply run and jump into the sand. For the youngest or most inexperienced competitors this may
Nick Newman, MS The Horizontal Jumps: Approach Run To an untrained eye it appears that horizontal jumpers simply run and jump into the sand. For the youngest or most inexperienced competitors this may
 B. R. A. N. D. S. #190 EXCELLENCE IN 3DIMENSIONAL CUEING Lawrence Biscontini, MA International Spa and Wellness Consultant Mission: wellness without walls I. INTRODUCTIONS 1. Nämaste! ( My inner peace
B. R. A. N. D. S. #190 EXCELLENCE IN 3DIMENSIONAL CUEING Lawrence Biscontini, MA International Spa and Wellness Consultant Mission: wellness without walls I. INTRODUCTIONS 1. Nämaste! ( My inner peace
Intelligent Autonomous Agents. Ralf Möller, Rainer Marrone Hamburg University of Technology
 Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Intelligent Autonomous Agents Ralf Möller, Rainer Marrone Hamburg University of Technology Lab class Tutor: Rainer Marrone Time: Monday 12:15-13:00 Locaton: SBS93 A0.13.1/2 w Starting in Week 3 Literature
Carnegie Mellon University Annual Progress Report: 2011 Formula Grant
 Carnegie Mellon University Annual Progress Report: 2011 Formula Grant Reporting Period January 1, 2012 June 30, 2012 Formula Grant Overview The Carnegie Mellon University received $943,032 in formula funds
Carnegie Mellon University Annual Progress Report: 2011 Formula Grant Reporting Period January 1, 2012 June 30, 2012 Formula Grant Overview The Carnegie Mellon University received $943,032 in formula funds
Top-50 Mental Gym Workouts
 Top-50 Mental Gym Workouts Workout Name Overview Description Power Posing Developing A Growth Mindset Champions Time: On Time = Early Your Morning Ritual - Make Your Bed! Changing Your Story to Succeed
Top-50 Mental Gym Workouts Workout Name Overview Description Power Posing Developing A Growth Mindset Champions Time: On Time = Early Your Morning Ritual - Make Your Bed! Changing Your Story to Succeed
How do you design an intelligent agent?
 Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Intelligent Agents How do you design an intelligent agent? Definition: An intelligent agent perceives its environment via sensors and acts rationally upon that environment with its effectors. A discrete
Web-Mining Agents Cooperating Agents for Information Retrieval
 Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Web-Mining Agents Cooperating Agents for Information Retrieval Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Tanya Braun (Übungen) Organizational Issues: Assignments Start:
Lecture 9: Lab in Human Cognition. Todd M. Gureckis Department of Psychology New York University
 Lecture 9: Lab in Human Cognition Todd M. Gureckis Department of Psychology New York University 1 Agenda for Today Discuss writing for lab 2 Discuss lab 1 grades and feedback Background on lab 3 (rest
Lecture 9: Lab in Human Cognition Todd M. Gureckis Department of Psychology New York University 1 Agenda for Today Discuss writing for lab 2 Discuss lab 1 grades and feedback Background on lab 3 (rest
Lesson 1 Lesson 2 Lesson 3 Lesson 4 Lesson 5. Race Track Fitness. Target Heart Rate Worksheet. Equipment: Footballs Beanbags
 Fitness Tag Direct Teach Throwing and Catching Skills Rolling Catching Throwing Skill Cues 3 rd 5 th Grades Throwing and Catching/Cardiovascular Functions Unit Aerobic Projectiles Race Track Fitness Aerobic
Fitness Tag Direct Teach Throwing and Catching Skills Rolling Catching Throwing Skill Cues 3 rd 5 th Grades Throwing and Catching/Cardiovascular Functions Unit Aerobic Projectiles Race Track Fitness Aerobic
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents
 CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
CS 331: Artificial Intelligence Intelligent Agents 1 General Properties of AI Systems Sensors Reasoning Actuators Percepts Actions Environment This part is called an agent. Agent: anything that perceives
ArteSImit: Artefact Structural Learning through Imitation
 ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
ArteSImit: Artefact Structural Learning through Imitation (TU München, U Parma, U Tübingen, U Minho, KU Nijmegen) Goals Methodology Intermediate goals achieved so far Motivation Living artefacts will critically
Players must be committed to getting better on a daily basis.
 Players must be committed to getting better on a daily basis. c90x is the 90-day at-home skill building curriculum designed for Chesterfield United player s to improve your game and make you THE X-FACTOR!
Players must be committed to getting better on a daily basis. c90x is the 90-day at-home skill building curriculum designed for Chesterfield United player s to improve your game and make you THE X-FACTOR!
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Machine Learning! R. S. Sutton, A. G. Barto: Reinforcement Learning: An Introduction! MIT Press, 1998!
 Introduction Machine Learning! Literature! Introduction 1 R. S. Sutton, A. G. Barto: Reinforcement Learning: An Introduction! MIT Press, 1998! http://www.cs.ualberta.ca/~sutton/book/the-book.html! E. Alpaydin:
Introduction Machine Learning! Literature! Introduction 1 R. S. Sutton, A. G. Barto: Reinforcement Learning: An Introduction! MIT Press, 1998! http://www.cs.ualberta.ca/~sutton/book/the-book.html! E. Alpaydin:
Situation Reaction Detection Using Eye Gaze And Pulse Analysis
 Situation Reaction Detection Using Eye Gaze And Pulse Analysis 1 M. Indumathy, 2 Dipankar Dey, 2 S Sambath Kumar, 2 A P Pranav 1 Assistant Professor, 2 UG Scholars Dept. Of Computer science and Engineering
Situation Reaction Detection Using Eye Gaze And Pulse Analysis 1 M. Indumathy, 2 Dipankar Dey, 2 S Sambath Kumar, 2 A P Pranav 1 Assistant Professor, 2 UG Scholars Dept. Of Computer science and Engineering
State Estimation: Particle Filter
 State Estimation: Particle Filter Daniel Seliger HAUPT-/ BACHELOR- SEMINAR ADAPTIVE 28.06.2012 SYSTEME PST PROF. DR. WIRSING 14. JUNI 2009 VORNAME NAME Overview 1. Repitition: Bayesian Filtering 2. Particle
State Estimation: Particle Filter Daniel Seliger HAUPT-/ BACHELOR- SEMINAR ADAPTIVE 28.06.2012 SYSTEME PST PROF. DR. WIRSING 14. JUNI 2009 VORNAME NAME Overview 1. Repitition: Bayesian Filtering 2. Particle
Raising the Performance Bar through a Season. Wade Gilbert, PhD
 Raising the Performance Bar through a Season Wade Gilbert, PhD wgilbert@csufresno.edu @WadeWgilbert Our culture helped us win the game (2015 champion coach) Normalizing the abnormal See if we can't be
Raising the Performance Bar through a Season Wade Gilbert, PhD wgilbert@csufresno.edu @WadeWgilbert Our culture helped us win the game (2015 champion coach) Normalizing the abnormal See if we can't be
CS/NEUR125 Brains, Minds, and Machines. Due: Friday, April 14
 CS/NEUR125 Brains, Minds, and Machines Assignment 5: Neural mechanisms of object-based attention Due: Friday, April 14 This Assignment is a guided reading of the 2014 paper, Neural Mechanisms of Object-Based
CS/NEUR125 Brains, Minds, and Machines Assignment 5: Neural mechanisms of object-based attention Due: Friday, April 14 This Assignment is a guided reading of the 2014 paper, Neural Mechanisms of Object-Based
Simple steps to start your own peer support group
 About Suffolk Mind Suffolk Mind is a registered charity affiliated to the national charity Mind and is committed to improving the lives of people with mental health issues in Suffolk. All of our services
About Suffolk Mind Suffolk Mind is a registered charity affiliated to the national charity Mind and is committed to improving the lives of people with mental health issues in Suffolk. All of our services
The drills grouped together in this course all relate to the Glide Skate Kick.
 Glide Kick Skate Drills First Three Lessons The Glide Kick: What Matters Most 0:00 The drills grouped together in this course all relate to the Glide Skate Kick. This is the type of skate kick used in
Glide Kick Skate Drills First Three Lessons The Glide Kick: What Matters Most 0:00 The drills grouped together in this course all relate to the Glide Skate Kick. This is the type of skate kick used in
Fundamentals of Cognitive Psychology, 3e by Ronald T. Kellogg Chapter 2. Multiple Choice
 Multiple Choice 1. Which structure is not part of the visual pathway in the brain? a. occipital lobe b. optic chiasm c. lateral geniculate nucleus *d. frontal lobe Answer location: Visual Pathways 2. Which
Multiple Choice 1. Which structure is not part of the visual pathway in the brain? a. occipital lobe b. optic chiasm c. lateral geniculate nucleus *d. frontal lobe Answer location: Visual Pathways 2. Which
Action Based Learning The benefits of Physical activity on academic performance
 Action Based Learning The benefits of Physical activity on academic performance Presented by: Cheryl Peat Project Officer, ACHPER eat well be active Primary Schools Project My Bonnie lies over the ocean
Action Based Learning The benefits of Physical activity on academic performance Presented by: Cheryl Peat Project Officer, ACHPER eat well be active Primary Schools Project My Bonnie lies over the ocean
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention
 Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of
Oscillatory Neural Network for Image Segmentation with Biased Competition for Attention Tapani Raiko and Harri Valpola School of Science and Technology Aalto University (formerly Helsinki University of